Курсовая работа: Разработка и исследование системы автоматического регулирования температуры электропечи на базе промышленного регулятора Р-111
![]() (3.16)
(3.16)
Полученный переходный процесс для объекта управления и экспериментальный переходный процесс замкнутой системы изображён на рисунке 3.3:
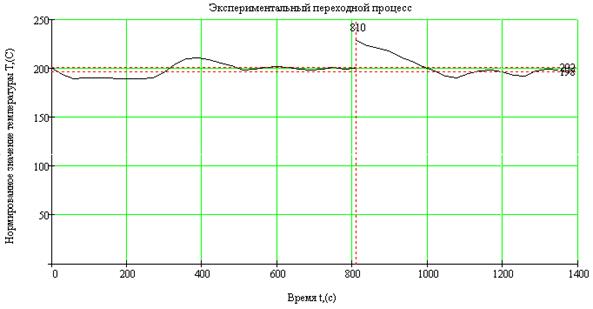
Рисунок 3.3 – Реакция замкнутой системы на единичный скачок
перерегулирование: ![]() .
.
ЗАКЛЮЧЕНИЕ
В ходе выполнения данного курсового проекта нами была изучена и исследована САР температуры жидкости в термостате на основе промышленного цифрового регулятора ТРМ-10. Был произведен расчет системы стабилизации температуры, работающей в заданном диапазоне изменения выходной переменной при заданном уровне и типе возмущений, и обеспечивающей требуемые характеристики точности и качества стабилизации. Были проведены эксперименты с системой, реализованной на учебном стенде.
По экспериментальным данным была найдена передаточная функция объекта управления в виде модели первого порядка и моделей второго порядка, найденных по упрощённому методу площадей и методу Ротача. По результатам сравнения теоретических переходных процессов с экспериментальным за окончательную модель объекта управления была принята модель, рассчитанная по упрощенному методу площадей, как модель, имеющая наименьшую оценку c2: ![]() .
.
Коэффициент усиления объекта управления был найден по статической передаточной характеристике. Исходя из требований к системе по точности и качеству, был синтезирован ПИД-регулятор с помощью метода ЛАЧХ.
В результате была синтезирована желаемая передаточная функция прямой цепи: ![]() .
.
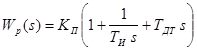
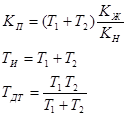
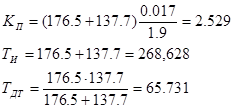
Для которой был получен ПИД-регулятор в виде:
Для замкнутой системы с синтезированным ПИД-регулятором был построен переходный процесс, по которому было найдено время регулирования tр=520 с и перерегулирование s=5%, что соответствует требованиям задания.
П ЕРЕЧЕНЬ ССЫЛОК
1 Рей У. /Методы управления технологическими процессами./ – М.: «Мир». 1983.
2 Ротач В. Я. /Расчет динамики промышленных автоматических систем./ – М.:«Энергия». 1973.
3 Паспортные данные.
Приложение А
Результаты снятия переходного процесса объекта управления
| 0 | 3 | 28 | 0.04 |
| 30 | 5 | 30 | 0.11 |
| 60 | 8 | 32 | 0.17 |
| 90 | 17 | 35 | 0.22 |
| 120 | 30 | 39 | 0.45 |
| 150 | 40 | 44 | 0.66 |
| 180 | 53 | 50 | 0.93 |
| 210 | 70 | 56 | 1.23 |
| 240 | 85 | 63 | 1.58 |
| 270 | 103 | 71 | 1.96 |
| 300 | 115 | 78 | 2.37 |
| 330 | 127 | 84 | 2.67 |
| 360 | 140 | 90 | 2.93 |
| 390 | 153 | 98 | 3.10 |
| 420 | 165 | 106 | 3.16 |
| 450 | 179 | 112 | 3.22 |
| 480 | 190 | 118 | 3.26 |
| 510 | 200 | 123 | 3.32 |
Приложение Б
Результаты снятия переходного процесса замкнутой системы
| 0 | 200 |
| 30 | 194 |
| 60 | 190 |
| 90 | 191 |
| 120 | 191 |
| 150 | 191 |
| 180 | 190 |
| 210 | 190 |
| 240 | 190 |
| 270 | 191 |
| 300 | 196 |
| 330 | 205 |
| 360 | 210 |
| 390 | 211 |
| 420 | 209 |
| 450 | 206 |
| 480 | 203 |
| 510 | 199 |
| 540 | 200 |
| 570 | 201 |
| 600 | 202 |
| 201 | |
| 200 | |
| 199 | |
| 200 | |
| 201 | |
| 200 | |
| 229 | |
| 224 | |
| 221 | |
| 218 | |
| 212 | |
| 208 | |
| 202 | |
| 198 | |
| 192 | |
| 191 | |
| 195 |