Курсовая работа: Разработка следящей системы промышленного робота
На рисунке приняты такие обозначения:
ЗЭ – задающий элемент, формирующий задающие воздействие по угловому положению;
КЭ1, КЭ2 – корректирующие элементы;
УПЭ1, УПЭ2 – усилительно-преобразующие элементы;
ИД – исполнительный двигатель;
СЭ1, СЭ2 – сравнивающие элементы;
МВН (t) – момент внешних сил;
q(t) – реальное угловое положение звена.
Задающий элемент ЗЭ формирует информацию о требуемых траекториях перемещения звеньев манипулятора и захватного устройства. Корректирующий элемент КЭ1 и усилительно-преобразующий УПЭ1 совместно выполняют функцию регулятора положения, характеристика которого может перестраиваться с целью достижения требуемых динамических качеств. Усилительно-преобразующий элемент УПЭ2 является усилителем мощности, совместно УПЭ2 и корректирующий элемент КЭ2 выполняют функцию регулятора скорости, от их выбора существенно зависят динамические характеристики ССПР. Остальные элементы следящей системы: электродвигатель ИД, датчик скорости ДС, датчик положения ДП, редуктор МП конструктивно входят в состав исполнительного органа манипулятора и являются неизменяемой частью системы, поскольку не могут быть изменены в процессе настройки ССПР. Как видно из рисунка, функциональная схема содержит два контура регулирования: подчинённый контур регулирования скорости двигателя (сервопривод) и контур регулирования углового или линейного положения (следящий привод).
Следящие системы ПР определяют важнейшие технические характеристики работы, в частности, его точность и быстродействие. В комплексе работы всех следящих систем ПР должна обеспечивать минимальное значение погрешности позиционирования захватного устройства манипулятора при максимально возможном быстродействии. При этом также необходимо обеспечить апериодичность процессов управления, т.к. перерегулирование в следящих системах, приводящее к «перебегу» заданных траекторий, могут привести к аварийным ситуациям. Будем рассматривать следящую систему промышленного робота, в которой в качестве исполнительного двигателя используется двигатель постоянного тока с независимым возбуждением. В качестве функциональных элементов ССПР используются следующие устройства: усилителем мощности является тиристорный преобразователь, измерителем скорости – тахогенератор постоянного тока, измеритель углового положения – потенциометрический датчик, корректирующие устройства регуляторов скорости и положения выбираются в процессе расчёта следящей системы.
2 МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОТДЕЛЬНЫХ ЗВЕНЬЕВ СИСТЕМЫ
В данном пункте курсовой работы стоит задача получить математическое описание двигателя постоянного тока. Структурная схема двигателя постоянного тока представлена на рисунке 3.1.
![]()
![]() Мс(s)
Мс(s)

Рисунок 2.1 - Структурная схема двигателя постоянного тока
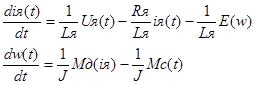
С учетом обозначения сигналов на функциональной схеме, во временной области математические модели можно записать следующим образом:

где ω – угловая скорость вращения вала двигателя;
J – момент инерции всех вращающихся частей;
E ( w ) – ЭДС;
M с - момент сопротивления на валу двигателя
M д – вращающий момент (динамический момент сил)
Разрешим каждое из уравнений относительно производных: выражаем производные и получаем систему дифференциальных уравнений:
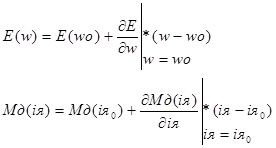
Так как Мд и E(w) являются нелинейными, то необходимо выполнить линеаризацию. Принимая i=iя0 ; U=Uяo ; w=wo ; Mc=Mco ;
Раскладываем в ряд Тейлора и получаем:
Получаем:
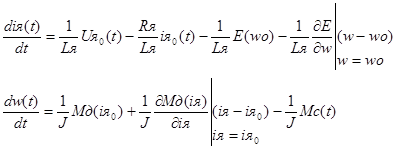 (1)
(1)
Так как в установившемся режиме все производные равны нулю, то можем переписать систему в следующем виде: