Курсовая работа: Разработка следящей системы промышленного робота
Очевидно, что требования по статической ошибке мы выполнили. В свою очередь общий коэффициент усиления - К определяется произведением:
![]()
![]()
![]()
Таким образом, мы получили К такое, что удовлетворяются условия заданной точности и полностью решили требуемую задачу, т.е.
![]()
Передаточная функция сервопривода примет следующий вид:
, где ![]() сервопривод безкоррекции.
сервопривод безкоррекции.

![]()
Проверяем на устойчивость по алгебраическому критерию – критерию Гурвица. Строим матрицу Гурвица
![]() для того чтобы система была устойчива необходимо и достаточно, чтобы все главные миноры (диагональ) матрицы Гурвица были положительны (>0) определители больше нуля следовательно система устойчива. Строим переходный процесс в сервоприводе
для того чтобы система была устойчива необходимо и достаточно, чтобы все главные миноры (диагональ) матрицы Гурвица были положительны (>0) определители больше нуля следовательно система устойчива. Строим переходный процесс в сервоприводе

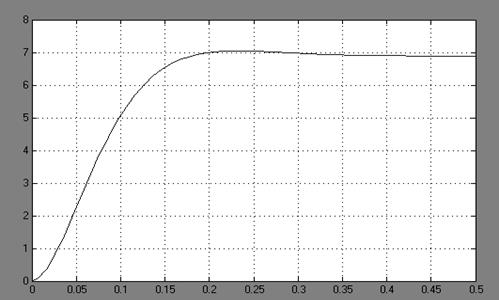
Рисунок 3.1 - Переходный процесс в сервоприводе и по нему определяем прямые показатели качества:
- время регулирования tP = 0.15c
- перерегулирование σ =2,9%
Решение задачи обеспечения прямых показателей качества
При невозможности решить задачу повышения запасов устойчивости в рамках имеющейся системы приходится идти на изменение структуры, т.е. вводят корректирующие звенья в систему. Для решения этой задачи будем использовать метод академика Солодовникова. С помощью этого метода мы синтезируем новое звено в сервоприводе. При этом структура корректирующего звена неизвестна, необходимо с помощью метода ЛАЧХ Солодовникова выбрать звено таким образом, чтобы прямые показатели качества были бы не хуже заданным по ВЗ.
Структурная схема САУ сводится к виду
Такое приведение схемы может быть сделано, так как передаточная функция обратной связи W8 является безинерционным звеном. Обозначим произведение передаточных функций прямой цепи, как передаточную функцию неизменяемой части системы :
![]()
Структурную схему можно представить в следующем виде:

Рисунок 3.3 - Структурная схема САУ