Курсовая работа: Разработка следящей системы промышленного робота
Обозначим, что :
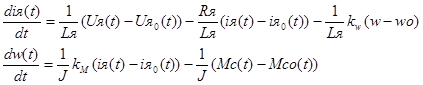
Теперь, чтоб получить линеаризованную модель, почленно вычитаем из (1) (2):
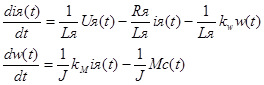
Считая отклонения Δ U я, Δ i я, Δ w малыми величинами, можно записать:
Применяя преобразование Лапласа, можно получить данную систему уравнений в операторной форме:
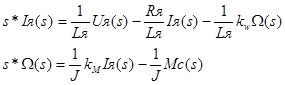 (3)
(3)
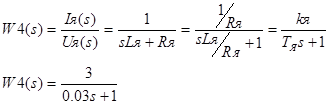
Теперь получим выражения для передаточных функций W4, W5, W6 в операторной форме. Введем обозначения:
![]()
Тогда получаем выражение для передаточной функции W4(s) и в соответствии с вариантом задания записываем её вид:
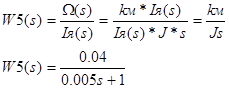
Передаточная функция W5(s) получается из второго уравнения (3):
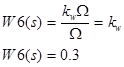
Передаточная функция W6(s):
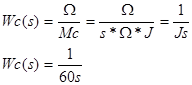
Теперь, принимая во внимание момент Mc.
Найдем передаточную функцию Wc c помощью второго уравнения (3): принимая ток якоря =0
Теперь можно получить выражение для передаточной функции двигателя по управлению.
Приводим к виду:


Находим корни характеристического полинома: S1 =-10,5 S2 =-22,8
Можно сделать вывод, что т.к. корни оба левые, то полином устойчив.
Структурная схема системы в целом будет иметь вид, представленный на рисунке 4.1: