Курсовая работа: Решение обратной задачи динамики
- Момент аэродинамических сил, действующий на руль относительно его оси вращения ![]()
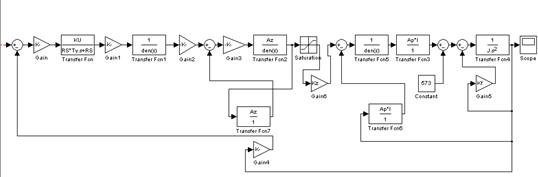
Средствами simulink:
Данная задача относится к так называемым обратным задачам динамики.
Основные направления развития концепций обратных задач динамики
Динамика как раздел науки о движении рассматривает следующие задачи:
– по заданным силам, действующим на систему, определить закон движения (траекторию) этой системы;
– по заданному закону движения системы определить силы, под действием которых это движение происходит.
Эти задачи являются в определенном смысле противоположными по своему содержанию. Поэтому их именуют прямой и обратной задачами.
Хотя обратные задачи динамики имеют давнюю и богатую историю, в настоящее время можно встретить их различное толкование и понимание. Наиболее обобщенное определение понятия обратных задач динамики следующее. Обратными задачами динамики называются задачи об определении активных сил, действующих на механическую систему, параметров механической системы и связей, наложенных на систему, при которых движение с заданными свойствами является одним из возможных движений рассматриваемой механической системы.. Здесь под обратными задачами динамики понимаются задачи об определении законов управления движением динамических систем и их параметров из условия осуществления движения по назначенной траектории.
На протяжении длительного времени первая задача являлась основной. В средние века предметом исследований классической механики оказалось, в основном, установление свойств движения заданной механической системы под действием полностью известных сил, т.е. решались так называемые детерминированные прямые задачи динамики. В те времена это и было оправдано, так как соответствующий уровень развития производительных сил потребовал решения в первую очередь задач установления свойств движения механических систем различных конструкций под действием заданных нагрузок и сил. Кроме того, решение прямых задач привлекало еще и тем, что, казалось, оно может восстановить прошлое в движении механической системы и предсказать будущее, если известно состояние системы в данный момент времени. Правда, эта иллюзия детерминизма была вскоре развеяна, в основном, благодаря развитию одного из разделов самой классической механики, теории устойчивости движения. Было установлено, что ни один процесс в природе не происходит так, как он определяется решением соответствующих уравнений движения при заданных начальных условиях.
Это объясняется, во-первых, тем, что сами уравнения движения не могут быть составлены точно с учетом всех явлений; во-вторых, любое движение механической системы сопровождается начальными, параметрическими и постоянно действующими возмущениями, они и вызывают отклонение действительного движения системы от движения, полученного решением детерминированной прямой задачи. Было установлено также, что для сохранения желательных свойств движения необходимо управлять движением рассматриваемой механической системы, добиваться устойчивости этого движения, требовать, чтобы оно было неподатливым ко всякого рода возмущениям. А для этого предварительно приходилось решать обратные задачи динамики, определять, при каких условиях осуществимо движение с заданными свойствами.
С другой стороны, и само развитие теории управления движениями материальных систем вызвало необходимость решения обратных задач динамики в различных постановках. Все это привело к тому, что обратные задачи классической механики оказались своего рода направляющими и исходными задачами современной науки об управлении движениями материальных систем различной физической природы и конструкций.
В настоящее время можно говорить о трех классах обратных задач динамики:
– обратные задачи аналитической механики;
– обратные задачи динамики управляемого полета;
– обратные задачи динамики в теории автоматического управления.
Обратные задачи динамики в теории автоматического управления
Теория автоматического управления и регулирования развивалась независимо от возникновения и развития концепций обратных задач динамики. Начиная с первых простейших автоматических регуляторов, инженеры и конструкторы создавали автоматические системы, которые обеспечивали протекание управляемых процессов по желаемым законам. В результате в теории автоматического управления разработано большое число практических приемов и методов, которые успешно применяются при проектировании и создании автоматических систем различного назначения. В основе каждого метода заложены концепции обратных задач динамики управляемых систем.
Действительно, частотные методы расчета и проектирования систем автоматического регулирования и управления основаны на приближении частотных характеристик проектируемой системы к соответствующим характеристикам желаемого вида, т.е. процессы в проектируемой системе должны быть близки к процессам, протекающим в некоторой эталонной системы, отвечающей требованиям технического задания на проектирования.
Расчет параметров систем автоматического регулирования корневыми методами также основан на приближении динамических характеристик проектируемой системы к соответствующим характеристикам некоторой эталонной системы. Мера близости динамических характеристик в таких процедурах расчета определяет соответствие между распределениями корней характеристических уравнений проектируемой и эталонной систем.
В теории автоматического управления широкое развитие получили методы синтеза замкнутых систем, основанные на решении оптимизационных задач с использованием различных функционалов, характеризующих качество процессов управления. Большое число процедур было разработано для параметрической оптимизации систем регулирования по критерию минимума интегральных квадратичных оценок, введенных А.А. Красовским еще в 40-е годы.
По определению интегральными квадратичными оценками рассматриваемой системы являются:
![]() - оценка нулевого порядка,
- оценка нулевого порядка,
![]() - оценка первого порядка,
- оценка первого порядка,
![]() - оценка порядка n ,
- оценка порядка n ,
где x (t ) – выходная переменная, характеризующая состояние системы![]() - ее производные; n – порядок системы. Величины
- ее производные; n – порядок системы. Величины ![]() постоянны и имеют размерность времени.
постоянны и имеют размерность времени.
Для вычисления интегральных квадратичных оценок разработаны различные приемы и способы, которые можно в учебной литературе по теории автоматического регулирования.
Задача формулируется следующим образом. Задана структура динамической системы; некоторые параметры системы являются варьируемыми, а остальные должны оставаться неизменными. Требуется найти такие значения варьируемых параметров, при которых реализуется минимум какой-либо интегральной квадратичной оценки. Сформулированная задача является задачей параметрической оптимизации динамической системы. Найденные в результате ее решения параметры именуются оптимальными, а систему с такими параметрами называют оптимальной по переходному процессу.