Курсовая работа: Решение обратной задачи динамики
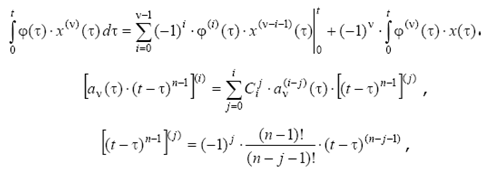
получим
 (2.8)
(2.8)
где
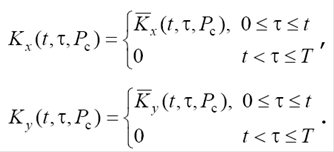
Уравнение (2.8) представляет собой уравнение Вольтера 2-го рода. Преобразуем его к интегральному уравнению Фредгольма 2-го рода на интервале исследования ![]() :
:
 (2.9)
(2.9)
где
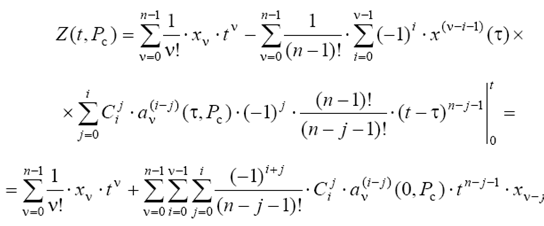
Таким образом, получены две эквивалентные формы описания системы: дифференциальное уравнение (2.2) с начальными условиями (2.3) и интегральное уравнение (2.9). Функция ![]() в выражении (2.9) представляет собой полином, коэффициенты которого зависят от начальных условий (2.3) и от множества
в выражении (2.9) представляет собой полином, коэффициенты которого зависят от начальных условий (2.3) и от множества ![]() искомых параметров настройки системы автоматического управления (регулирования). Перепишем
искомых параметров настройки системы автоматического управления (регулирования). Перепишем ![]() , изменив порядок суммирования
, изменив порядок суммирования
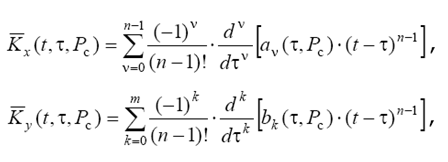
Введем следующие обозначения:
Тогда полином ![]() можно записать следующим образом
можно записать следующим образом

где ![]() - вектор-столбец начальных условий;
- вектор-столбец начальных условий; ![]() - вектор-столбец полиномов
- вектор-столбец полиномов ![]() .
.
Рассмотрим левую часть уравнения (2.9). Представим функции, входящие в нее, в виде разложений в ряд по ортонормированному базису ![]() .
.
Имеем
![]() , (2.10)
, (2.10)
где ![]() - спектральная характеристика выходного сигнала
- спектральная характеристика выходного сигнала ![]() , элементы которой определяются из соотношения
, элементы которой определяются из соотношения
![]() (2.11)
(2.11)
где ![]()
![]() - квадратная матрица размерностью
- квадратная матрица размерностью ![]() , элементы которой определяются из выражения
, элементы которой определяются из выражения

Подставив полученные разложения (2.10) и (2.11) в левую часть уравнения (2.9) и учитывая, что  , где
, где ![]() - единичная, в силу ортонормированности базисных функций, получим
- единичная, в силу ортонормированности базисных функций, получим
![]() (2.12)
(2.12)
где ![]() - матрица спектральной характеристики инерционной части системы размерностью
- матрица спектральной характеристики инерционной части системы размерностью ![]() .
.