Курсовая работа: Синтез систем подчиненного регулирования
Расчёт коэффициентов системы (2.4) и все дальнейшие расчёты выполнены с помощью программы "Mathcad 11 EnterpriseEdition".
Перейдём к относительным единицам, т.е.
![]() ,
, ![]() 2, 3, 4,
2, 3, 4,
где ![]() - некоторая стабилизирующая траектория.
- некоторая стабилизирующая траектория.
В этом случае мы переходим в фазовое пространство возмущённого движения:
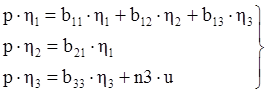 (2.5)
(2.5)
Перед нами стоит задача найти управление, ограниченное условием ![]() и оптимизирующее функционал вида:
и оптимизирующее функционал вида:
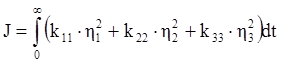 ,
,
где ![]()
![]() и
и ![]() - корректирующие коэффициенты, ограничивающие координаты
- корректирующие коэффициенты, ограничивающие координаты ![]()
![]() и
и ![]() соответственно.
соответственно.
Для решения поставленной задачи необходимо найти функцию Ляпунова, которая является решением функционального уравнения Беллмана:
 .
.
В этом случае управление ищется в виде:
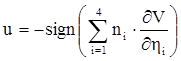 ,
,
где 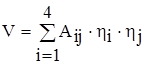
![]() .
.
Для определения коэффициентов функции Ляпунова воспользуемся векторным уравнением Барбашина:
![]() (2.6)
(2.6)
где С – матрица Барбашина
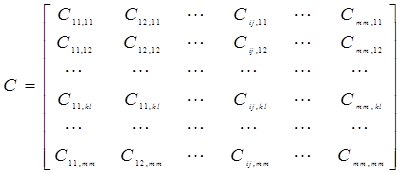
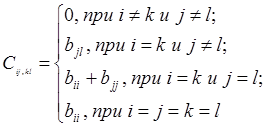 (2.7)
(2.7)
А – вектор-столбец коэффициентов Ляпунова;
К – вектор-столбец ограничивающих коэффициентов.
Для нашего случая уравнение (2.6) примет вид:
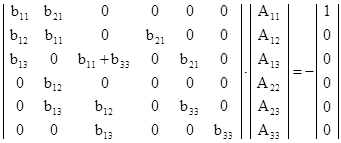
Для данной системы:
![]()
Таким образом управление имеет вид:
![]() . (2.8)
. (2.8)
В соответствии с (2.8) структурная схема контура тока примет вид, приведенный на рисунке 2.1.
Вычисление коэффициентов A13 , А23 и А33 произведено с помощью программы Mathcad 11 EnterpriseEdition.