Курсовая работа: Типовой алгоритм синтеза комбинированной системы автоматического управления

Подставив значения всех постоянных коэффициентов, получим:
![]() (8.3)
(8.3)
Алгоритм работы ЭВМ, осуществляющий компенсацию возмущающего воздействия, может быть получен на основании передаточной функции компенсатора следующим образом.
Пусть, например, сигнал компенсатора u2 (t) подаётся на вход объекта (вместе с сигналом регулирования u1 ) и пусть передаточная функция компенсатора:
![]() . (8.4)
. (8.4)
Тогда соответствующее операторное выражение имеет вид:
![]()
и в дифференциальной форме записывается в виде:
![]()
Переход к цифровым сигналам, взятым в дискретные моменты времени, может быть проведён по следующей схеме:
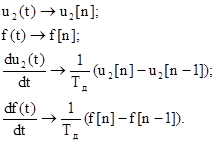
В результате перехода получим:
![]()
Отсюда:
 .
.
Подставив значения всех постоянных коэффициентов, получим:
![]()
![]()
![]()
![]() (8.5)
(8.5)
Окончательно управляющее воздействие цифрового регулятора с компенсацией возмущений получают суммированием регулирующего u1 (t) и компенсирующего u2 (t) воздействий:
![]() (8.6)
(8.6)
![]() (8.7)
(8.7)
9. Построение САУ с использованием методов нечёткой логики
Необходимо построить САУ с использованием методов нечёткой логики (фаззи-логики), оставив регулятор Р чётким, а компенсатор К выполнить нечётким.
Традиционный подход к синтезу САУ основывается на том, что модель ОУ заранее известна и задана либо в виде экспериментальных переходных характеристик, либо в виде передаточных функций отдельных каналов объекта. При известной цели управления алгоритм функционирования управляющего устройства (УУ) в этом случае однозначно предопределяется самой моделью и целью управления.
Однако на практике при автоматизации сложных технологических процессов, в том числе и процессов горно-обогатительного производства, получить математическую модель, достаточно полно отражающую реальные процессы в объекте, практически невозможно. Поэтому большинство реально действующих в промышленности автоматических систем управления сложными процессами создано, как правило, с использованием не только методов классической теории управления, но и с использованием методов экспериментального уточнения параметров системы, т.е. так называемой «настройкой системы на объект».
В настоящее время на смену этим методам приходят новые методы создания алгоритмов управления, выполненные на основе так называемой нечёткой логики (фаззи-логики).
9.1 Структурная схема комбинированной САУ с нечётким компенсатором
Необходимо составить структурную схему САУ с нечётким компенсатором, подав на него сигналы возмущения f и его производной f’ .