Курсовая работа: Типовой алгоритм синтеза комбинированной системы автоматического управления
Управляемая величина не зависит от возмущения, если передаточная функция по возмущению равна нулю. А это возможно, если равен нулю её числитель. Отсюда условие инвариантности стабилизируемой величины по отношению к возмущению:
![]() .
.
Находим передаточную функцию компенсирующего устройства:
 . (6.2)
. (6.2)
Подставляя в формулу (6.2) найденные ранее передаточные функции объекта по различным каналам и регулятора, получаем передаточную функцию компенсирующего устройства:

где запаздывание можно разложить следующим образом:
![]()
![]() (6.3)
(6.3)
Для удобства практической реализации компенсатора используется типовой физически реализуемый компенсатор, передаточная функция которого имеет вид:
![]() (6.4)
(6.4)
Вопрос при этом сводится к поиску таких k1 и Тк , при которых выражение (6.4) максимально приближается к (6.3). Делается это по следующим формулам:
 ,
,
где k – коэффициент усиления в формуле (6.3)
Ти – постоянная времени регулятора
По формулам разложения дробно-рациональных функций:
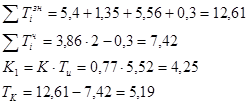
Полученная передаточная функция физически реализуемого компенсатора имеет вид:
![]()
7. Определение показателей качества в системе по возмущающему воздействию
Для построения переходной характеристики по возмущающему воздействию запишем передаточную функцию по возмущению:
![]()
Расчет и построение данного переходного процесса выполняется в программе «СС», он показан в приложении 4, рис. в.
Определяем показатели качества системы:
1. Статическая ошибка:
![]() .
.
2. Время регулирования:
![]()
3. Перерегулирование:
![]()