Дипломная работа: Расчёт и проектирование замкнутой системы воздушно-динамического рулевого привода летательного
l - плечо;
d, dm - угол поворота и максимальный угол поворота рулей;
W1,2 – объём рабочих полостей;
ТП1,2 - температура рабочего тела в полостях;
gП1,2 - удельный вес рабочего тела в полостях;
R - универсальная газовая постоянная;
Iå - приведённый суммарный момент инерции подвижных частей;
f - коэффициент вязкого трения;
mш (d) - жёсткость шарнирной нагрузки;
МСТР - момент сухого трения;
k0 - газодинамический коэффициент;
pP - давление в ресивере;
YP1,2 , YП1,2 - газодинамические функции режима течения;
m SВХ1,2 , m SВЫХ1,2 - эффективные площади втекания и истечения в рабочих полостях;
p0 - давление в отсеке;
с - коэффициент, характеризующий регулируемое втекание;
a, am - угол поворота и максимальный угол поворота якоря управляющего электромагнита;
а, aУ - коэффициенты, характеризующие регулируемое истечение.
1.5 Разработка рулевого привода
Необходимо спроектировать рулевой привод, обеспечивающий воспроизведение управляющих сигналов в полосе частот от 28 с-1 до 91 с-1 и амплитуд до 15° угла поворота рулей с фазовым сдвигом 15°±13°. Процесс разработки привода представлен на схеме рис. 1.6.
Разработка малогабаритной танковой управляемой ракеты накладывает существенные ограничения на габариты и массу рулевого привода. Кроме того, в настоящее время не менее актуальна разработка технологичных, выполненных из отечественных недефицитных материалов и, следовательно, имеющих низкую себестоимость рулевых приводов. Габариты и масса РП существенно зависят от потребной выходной мощности и определяются применяемыми типом и структурой системы привода. Для пропорционального закона управления рулевыми органами наименьшие габариты обеспечиваются при применении автоколебательной системы привода с двухпозиционным управлением (рис. 1.7).
В качестве привода управляемой ракеты выбран воздушно-динамический рулевой привод со струйным распределительным устройством.
Воздушно-динамический РП не требует специального источника питания, габариты которого в значительной степени зависят от времени работы и мощности привода.
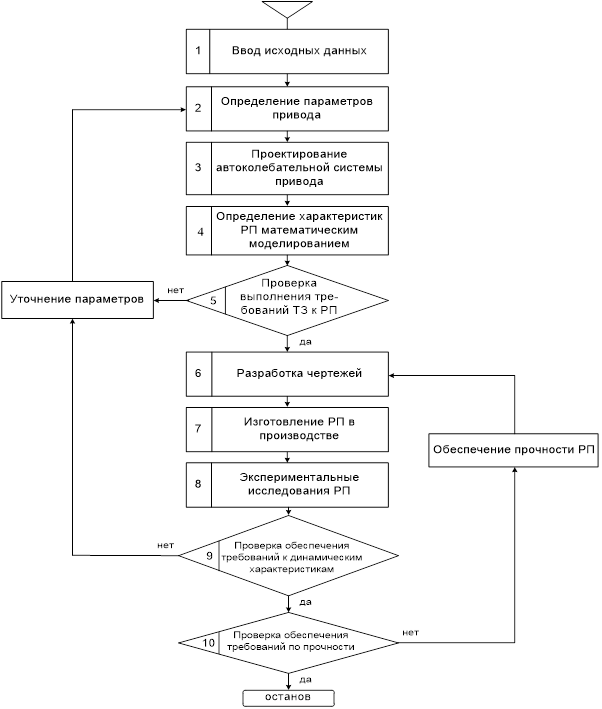
Рис. 1.6 Алгоритм разработки рулевого привода

Рис. 1.7 Автоколебательная система привода с двухпозиционным управлением
Для воздушно-динамического привода характерно согласование действующих шарнирных нагрузок с развиваемым приводом моментом, а также скорости вращения по крену со скоростью перемещения рулей, вследствие чего по времени полёта обеспечивается практически постоянный фазовый сдвиг на частотах вращения ракеты по крену.
Стабильность динамических характеристик ВДРП по времени управляемого полёта ракеты позволяет расширить допуски на конструктивные параметры рулевых приводов, работающих на традиционных источниках питания: сжатом газе высокого давления, горячем пороховом газе, электрической энергии.