Дипломная работа: Расчёт и проектирование замкнутой системы воздушно-динамического рулевого привода летательного
Проектирование автоколебательной системы ВДРП проводится по математической модели параметрической идентификации:
- уравнение суммирующего устройства:
![]()
- уравнение корректирующего фильтра:
![]()
- уравнение релейного элемента усилителя:
- уравнение релейного элемента усилителя:
- уравнение управляющего электромагнита:
 , где
, где ![]()
- уравнение исполнительного двигателя:
где 
Расчёт обобщённых и конструктивных параметров производится для режима наихудших энергетических возможностей, который соответствует максимуму отношения потребной мощности к развиваемой при отработке гармонического сигнала с амплитудой δ0 и частотой ![]() при шарнирной нагрузке, имеющей пружинный характер, т. е. из условия минимума энергетической функции привода:
при шарнирной нагрузке, имеющей пружинный характер, т. е. из условия минимума энергетической функции привода:
где ![]() – частота вращения ракеты, рад/с;
– частота вращения ракеты, рад/с;
![]() – момент шарнирной нагрузки, Н∙м;
– момент шарнирной нагрузки, Н∙м;
![]() – газодинамическая функция режима течения (рис. 1.8);
– газодинамическая функция режима течения (рис. 1.8);
![]() – величина избыточного давления, Па;
– величина избыточного давления, Па;
![]() – температура окружающей среды, К;
– температура окружающей среды, К;
t – время полёта, с.
Режим наихудших энергетических возможностей соответствует ![]() полёта при температуре
полёта при температуре ![]() (рис. 1.9). Для указанного режима значения параметров следующие:
(рис. 1.9). Для указанного режима значения параметров следующие:
- число маха М ………………………………………………………1.17;
- момент шарнирной нагрузки ![]() ………………………-0.937;
………………………-0.937;
- избыточное давление ![]() ………………………………..1.22×105 ;
………………………………..1.22×105 ;
- частота вращения по крену ![]() ……………………………..9.3±1.9.
……………………………..9.3±1.9.
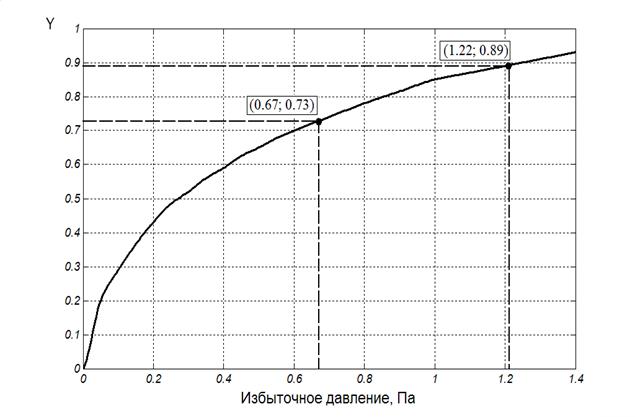
Рис. 1.8 График зависимости числа Y от величины избыточного давления.