Контрольная работа: Анализ систем автоматического управления
3. Полагая К = 0.7КГР , записываем аналитическое выражение для φ( w ) = argW ( jw ) , L ( w ) = 20 lg | W ( jw )| из W ( s ) при s = jw .
К=0.7Кгр = 3,243
Передаточную функцию разомкнутой системы можно записать в виде:
![]()
![]()
где
![]()
![]()
тогда:
![]()
![]()
где

Строим графики логарифмических характеристик разомкнутой системы, с помощью MATLAB(оператор bode или margin ) Рис. 1.3 а.
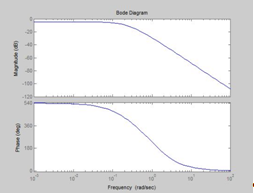
Рис. 1.3а
Строим график АФЧХ с помощью MATLAB(оператор nyquist ) рис. 1.3 б для разомкнутой системы.
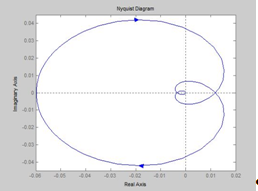
Рис 1.3 б
Запасы устойчивости по модулю и фазе определяются по логарифмическим характеристикам (см. рис. 1.3 а): на частоте среза w с определяется запас по фазе —∆φ, а запас по амплитуде ∆ L - на частоте при которой φ( w ) = -180. Таким образом, ∆ L ≈0. 1дБ, ∆φ≈ 0°, что является недостаточным.
4 . Величина ошибки по скорости определяется как e ск =V 1 / K . Для ориентировочной оценки tпп и σ следует построить переходной процесс h ( t ) (оператор stepв MATLAB) при v ( t ) = 1[ t ] и по нему определить tпп и σ.
Для получения уравнений состояний в нормальной форме используем дифференциальное уравнение замкнутой системы
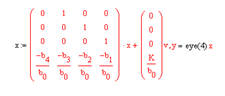
D(s)y(t)=Kv (t). Если D(s)=b0 s4 +b1 s3 +b2 s2 +b3 s+b4 =0, ,то уравнение состояния имеет вид
Для описания динамических систем в пространстве состояний в Matlabприменяются модели подкласса ss, которые основаны на линейных дифференциальных или разностных уравнениях.
Модель непрерывной системы в подклассе ssимеет вид:
![]()
![]()
где: х - вектор состояния;v - вектор входа; у - вектор выхода.