Контрольная работа: Анализ систем автоматического управления
Получаем выражение:
![]()
где параметры gи fвидны из вышеприведенного выражения.
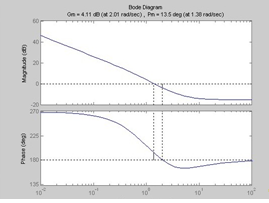
Рис 2.2
4. Рассматриваемая система для всех вариантов является астатической с астатизмом первого порядка и имеет следующую передаточную функцию:
![]()
![]()
В силу астатизма первого порядка в такой системе статическая ошибка всегда равна нулю, а скоростная еск вычисляется по формуле:
![]()
и следовательно, еск =1,999.
Вычислим коэффициенты ошибок. Величина С0 =0, а коэффициент ошибки

Где ![]() передаточная функция системы по ошибке.
передаточная функция системы по ошибке.
Тогда получим производную:

Подставив в последнее выражение найденные ранее значения и z=1, окончательно получим С1 =1,999.
5. При входном воздействии вида v ( k ) = l[k] переходный процесс взамкнутой системе можно вычислить с помощью моделирования импульсной системы в Matlab. Для этого необходимо задать передаточную функцию непрерывной части системы в tf - или zpk -форме, преобразовать ее в дискретную с помощью оператора c 2 d при заданном времени дискретизации T , а затем построить переходной процесс системы оператором step . Так же можно построить и логарифмические частотные характеристики импульсной системы -bode . Если задана передаточная функция замкнутой системы в виде:
![]()
и периодом дискретизации γ T , то получим
>> w0=tf([0.3 1 0],[0.3 1 1.411]) Transfer function:
0.1 s^2 + s
-------------------
0.1 s^2 + s + 3.738
0.2
>> w1=c2d(w0,0.24)
Transfer function:
z^2 - 0.8801 z - 0.1199
------------------------