Контрольная работа: Анализ систем автоматического управления
ЛАЧХ корректирующего устройства с характеристикой Lk (w ) соответствует функция:
где:
![]()
Общая передаточная функция разомкнутой системы с корректирующим звеном последовательного типа имеет вид:
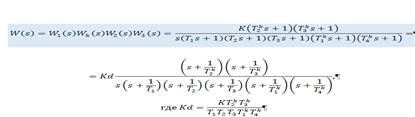
Далее воспользуемся функцией zpk(z, р, К), где zи р - векторы из нулей и полюсов, aKd- обобщенный коэффициент передачи, sys- любое имя присваиваемое модели. Тогда запись в системе Matlabпримет вид:
sys1=zpk([-1/t2k -1/t3k],[0 -1/t1 -1/t2 -1/t3 -1/t1k -1/t4k],kd)
Zero/pole/gain:
58.2 (s+2.5) (s+0.4762)
-------------------------------------------------
s (s+7.143) (s+4.167) (s+25) (s+0.4762) (s+0.097)
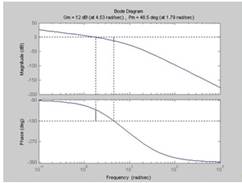
Рис. 1.6
6. Для нахождения переходных характеристик замкнутой системы с корректирующим звеном предварительно сформируем модель в пространстве состояний. Передаточная функция замкнутой системы имеет вид:
![]()

Для нахождения Ф(s) воспользуемся следующей последовательностью команд:
>>sys1=zpk([-1/t2k-1/t3k],[0 -1/t1 -1/t2 -1/t3 -1/t1k-1/t4k],kd)
Zam_ck=inv(l+sysl)*sysl- находится передаточная функция замкнутой системы. (Не оптимальная форма т.к. при такой последовательности команд не производится упрощение за счет сокращения одинаковых элементов числителя и знаменателя. В тоже время на результат дальнейшего расчета это не влияет).
>>Zam_ck=inv(1+sys1)*sys1
Переходная характеристика (рис. 1.7 ) находится с помощью функций: 0,05
Из рассмотрения рис. 1.7 видно, что параметры по заданию выполняются.
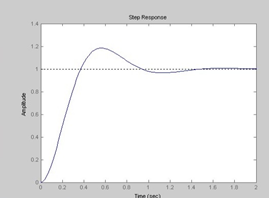
Рис 1.7
Для устранения неоптимальности записи в Zam_ck=inv(l+sysl)*syslможно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck.
2.Исследование линейной импульсной системы автоматического управления
Задание:
1) Найти передаточные функции импульсной САУ: W * ( z ) разомкнутой системы, Ф* ( z ) – замкнутой системы, Фе * ( z ) – системы по ошибке. Параметры Т, Т1 , τ1 , К0 , γ входят в выражения передаточных функций в общем виде, т. е. в буквенном виде. Знак «*» будет относиться к передаточным функциям импульсной системы.