Курсовая работа: Динамический расчет следящих систем
![]()

9. ПОСТРОЕНИЕ И АНАЛИЗ МОДЕЛИ СИСТЕМЫ.
Моделирование как исходной, так и синтезированной систем выполним в среде “SIMULINK” программного пакета “MATLAB”.
Убедимся в том, что оценки переменных состояния «догоняют» переменные состояния объекта на заданном интервале tнаб. Для этого составим структурную схему модели (объект + наблюдатель с управлением по переменным состояния).
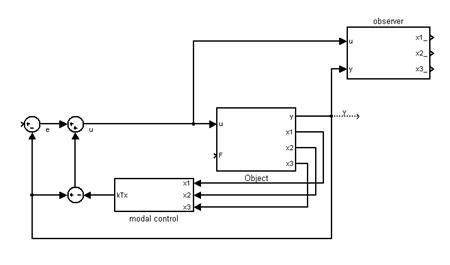
Рис.9. Структурная схема системы с управлением по переменным состояния.
При ненулевых начальных условиях на одном из интеграторов объекта:
Реализуем структурную схему системы с управлением по оценкам переменных состояния.
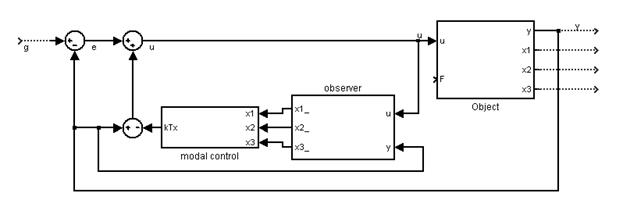
Рис. 13. Структурная схема системы с управлением по оценкам переменных состояния.
Подсистемы (subsystem) объекта управления, наблюдателя и модального управления набраны по соответствующим уравнениям и имеют следующий вид.
Объект управления:
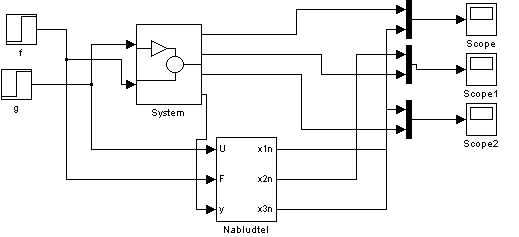
Рис. 14. Модель объекта с наблюдателем переменных состояния.
Наблюдатель:
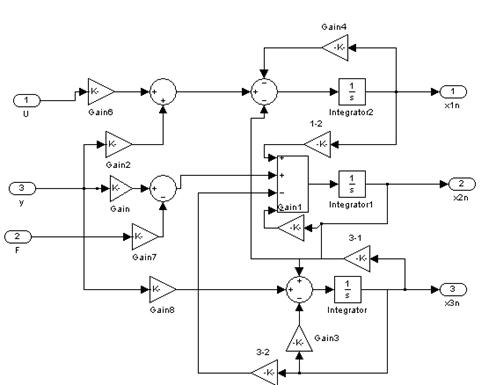
Рис. 15. Структурная схема наблюдателя переменных состояния
Модальное управление:
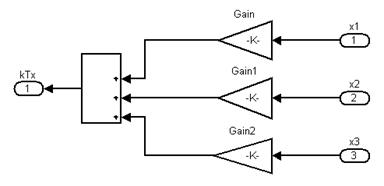
Рис.16. Модель управляющего устройства.
Смоделируем переходной процесс системы при ненулевом начальном условии на одном из интеграторов объекта.
Построим переходные процессы при ступенчатом и линейном изменении задающего воздействия, т.е. входного угла поворота.
На входе ступенчатое воздействие, возмущающего воздействия нет.
На входе ступенчатое воздействие, возмущающее воздействие есть.
На входе линейно нарастающее воздействие, возмущающего воздействия нет, Начальные условия – нулевые.
На входе линейно нарастающее воздействие, возмущающего воздействия нет. Начальные условия – ненулевые.
На входе линейно нарастающее воздействие, возмущающее воздействие есть. Начальные условия – ненулевые.
Анализ построенного наблюдателя Калмана.
Из приведенных графиков видно, что оценки переменных состояния «догоняют» переменные состояния объекта на заданном интервале ![]() (ошибка оценивания по прошествии этого времени практически равна нулю).
(ошибка оценивания по прошествии этого времени практически равна нулю).
Анализ построенного модального управления.
Из графиков ясно видно, что при отсутствии возмущающего момента ![]() система отрабатывает входное воздействие g(t) практически с нулевой ошибкой, к установившемуся значению приближаясь за время регулирования
система отрабатывает входное воздействие g(t) практически с нулевой ошибкой, к установившемуся значению приближаясь за время регулирования ![]() , т. е. переходная характеристика входит в пятипроцентный коридор точности полностью после времени регулирования. Это свидетельствует о правильности рассчитанного вектора коэффициентов модального управления.
, т. е. переходная характеристика входит в пятипроцентный коридор точности полностью после времени регулирования. Это свидетельствует о правильности рассчитанного вектора коэффициентов модального управления.
10.ЗАКЛЮЧЕНИЕ.