Курсовая работа: Динамический расчет следящих систем
Тип измерителя рассогласования – сельсины.
2) Проверить наблюдаемость, управляемость и устойчивость заданной части при коэффициенте усиления усилителя ![]() .
.
3) Начертить структурную расчетную схему заданной части, вывести уравнения вход-выход заданной части системы.
4) Построить модальное управление по заданному времени регулирования ![]() и условию астатизма первого порядка.
и условию астатизма первого порядка.
5) Построить наблюдатель Калмана для заданной части системы, перейти к управлению по оценкам переменных состояния, время переходного процесса в наблюдателе положить равным ![]() .
.
6) Проверить устойчивость замкнутой системы, построить переходные характеристики ![]() , воспользовавшись для моделирования пакетом SIMULINKforWindowsв системе MatLAB.
, воспользовавшись для моделирования пакетом SIMULINKforWindowsв системе MatLAB.
7) Осуществить выбор электрической схемы усилителя мощности (по литературным источникам), построить схему управляющего устройства вместе с наблюдателем на операционных усилителях и схему всей системы.
3.ОПИСАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ.
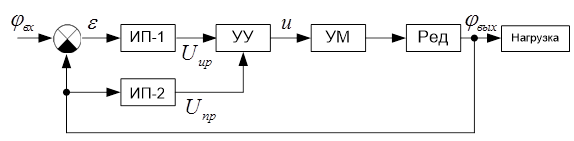
Рис.1. Функциональная схема проектируемой системы.
ИП-1 – измерительный преобразователь (сельсины)
ИП-2 – потенциометрический преобразователь угла поворота выходного вала
УУ – управляющее устройство
УМ – усилитель мощности
ИД – исполнительный двигатель
Ред – редуктор
Нагрузка – приводимый в движение рассматриваемой системой агрегат
В качестве измерительных преобразователей (чувствительных элементов) используются сельсины. Преобразователь угла поворота выходного вала ИП-2 берется потенциометрическим. Потенциометрические датчики обычно питаются от источника постоянного напряжения. Если измерительные преобразователи работают на переменном токе, то на их выходе включается фазочувствительный усилитель-выпрямитель, являющийся составной частью соответствующего ИП, т.е. его коэффициент передачи учтен в заданном коэффициенте передачи чувствительного элемента.
Управляющее устройство (УУ), принимает сигналы, поступающие с обоих ИП. В нем формируется напряжение, пропорциональное управляющему воздействию, которое затем подается на усилитель мощности (УМ). В курсовой работе синтезируется уравнение УУ и разрабатывается его схема на операционных усилителях.
4.УРАВНЕНИЯ ЭЛЕМЕНТОВ
4.1 Измеритель рассогласования.
В данной системе используется измеритель рассогласования на сельсинах, схема которого изображена на рисунке 2.
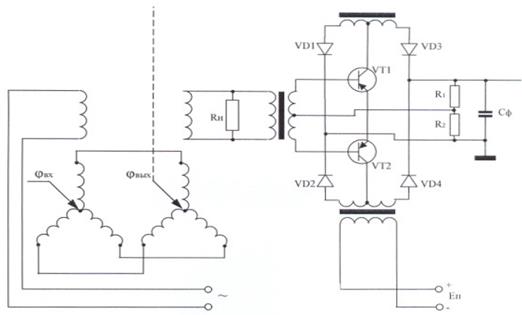
Рис.2. Схема измерителя рассогласования на сельсинах с фазочувствительным усилителем.
Измеритель рассогласования следует считать безынерционным, так как его постоянная времени на несколько порядков меньше постоянных времени остальных звеньев.
![]() ,
, ![]()
![]() ,
,
![]() ,
,
Уравнение измерителя рассогласования:
![]() , (1)
, (1)
где ![]() - коэффициент передачи измерителя рассогласования.
- коэффициент передачи измерителя рассогласования.
 (2)
(2)