Курсовая работа: Динамический расчет следящих систем
Сельсины являются индукционными машинами, которые позволяют при постоянном напряжении на выходе получать на выходных обмотках систему напряжений, амплитуда и фаза которых определяются угловым положением ротора. Сельсины также позволяют преобразовать такую систему напряжений в соответствующее ей угловое положение ротора или в напряжение, фаза и амплитуда которого являются функцией системы входных напряжений и угла поворота ротора. Поэтому сельсины часто применяются в качестве измерителей рассогласования следящих систем.
4.2 Датчик выхода.
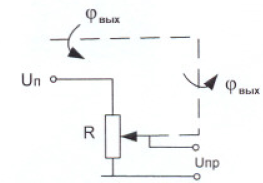
Рис.3. Схема датчика выхода.
Этот датчик угла поворота вала нагрузки описывается уравнением:
![]() , (3)
, (3)
где ![]() .
.
4.3 Усилитель мощности.
Так как по заданию усилитель мощности является звеном первого порядка, то его уравнение имеет вид:
![]() (4)
(4)
это уравнение вход-выход.
Обозначим ![]() , получим следующую систему:
, получим следующую систему:
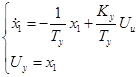 (5)
(5)
это уравнение усилителя.
Передаточная функция усилителя может быть записана в виде:
![]() (6)
(6)
Подставляя исходные значения ![]() ,
, ![]() , получим:
, получим:
![]() (7)
(7)
 (8)
(8)
![]() (9)
(9)
4.4 Редуктор.
По техническому заданию инерционность редуктора учитывается в уравнении двигателя, поэтому редуктор считается безынерционным звеном и его уравнение имеет вид:
![]()
Уравнение вход-выход и уравнение в переменных состояния:
![]()
Передаточная функция редуктора:
![]()
4.5 Двигатель постоянного тока.
Управление осуществляется по цепи якоря, магнитный поток в зазоре постоянный, а реакция якоря и гистерезис магнитной цепи отсутствует. В этом случае исходные уравнения двигателя оказываются линейными и образуют следующую систему уравнений:
 (10)
(10)
Здесь ![]() – приведенный к валу двигателя момент сопротивления;
– приведенный к валу двигателя момент сопротивления;
![]() – приведенный к валу двигателя момент инерции вращающихся частей;
– приведенный к валу двигателя момент инерции вращающихся частей;
![]() – напряжение, приложенное к якорю двигателя;
– напряжение, приложенное к якорю двигателя;