Курсовая работа: Динамический расчет следящих систем
![]()
![]() (16)
(16)
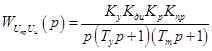
Передаточная функция двигателя:

Рис.4.Структурная схема двигателя.
![]() ; (17)
; (17)
![]() .
.
5.ВЫВОД УРАВНЕНИЙ СИСТЕМЫ.
5.1 Уравнения в переменных состояния.
Здесь объединяются уравнения всех элементов:
· Измерителя рассогласования;
· Датчика выхода;
· Усилителя мощности;
· Двигателя;
· Редуктора
в одну систему путем исключения промежуточных переменных так, чтобы остались входные величины (![]() ,
, ![]() ,
, ![]() ), переменные состояния (
), переменные состояния (![]() ,
,![]() ,
,![]() ) и величина
) и величина ![]() .
.
Уравнения в переменных состояния:
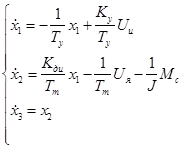 (18)
(18)
Здесь ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
5.2 Матричная форма уравнений в переменных состояния.
Учитывая
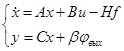
уравнения в переменных состояния в матричной форме будут иметь вид:
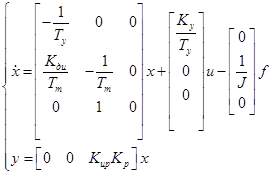 (18)
(18)
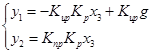
5.3 Уравнения вход-выход заданной части системы.
Для вывода уравнений вход-выход целесообразно построить структурную схему заданной части:
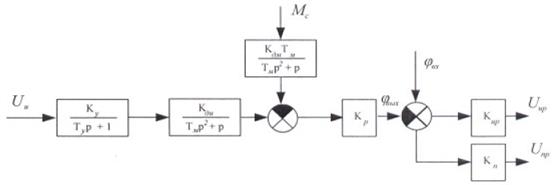
Рис.5. Структурная схема заданной части.
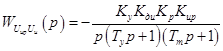
![]()