Курсовая работа: Идентификация параметра зазора при регулировании положения
![]() ; (4.5)
; (4.5)
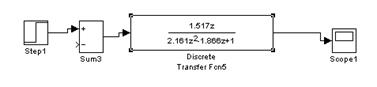
Реализуем данную функцию в MatLABe (см. рис. 4.3):
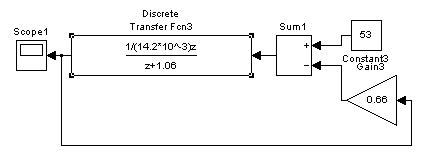
Рисунок 4.3 – Реализация подсистемы идентификации в MatLABe
Подсистема идентификации (ПИ) включается в систему управления следующим образом (см. рис. 4.4):
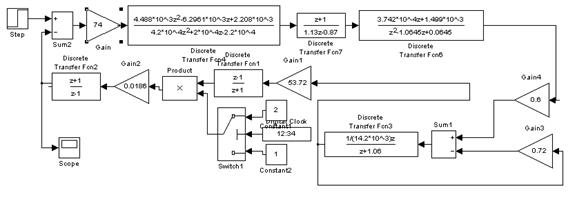
Рисунок 4.4 – Подключение ПИ в систему управления.
Исследуем переходные процессы в системах с ПИ и без нее при параметре момента инерции Jн =10Jд (см. рис. 4.5 и 4.6):
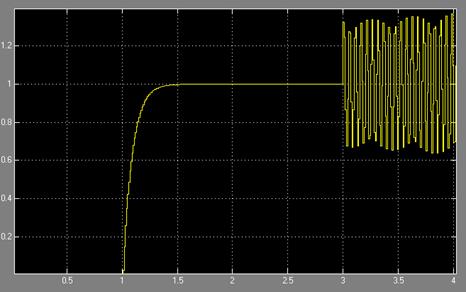
Рисунок 4.5 Переходные процессы без ПИ
|
|
|
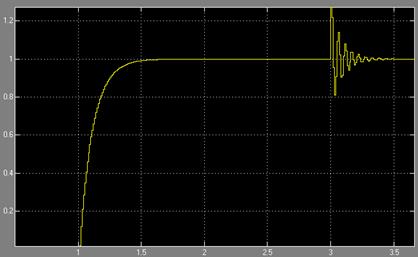
Рисунок 4.6 – Переходные процессы в системах с ПИ
Как видно из рисунка, уменьшилась колебательность системы, а также уменьшилась просадка скорости при изменении момента инерции нагрузки.
Действия ПИ аналогичны при моменте инерции нагрузки, равному 5Jд и Jд (см. рис. 4.7, 4.8):
|
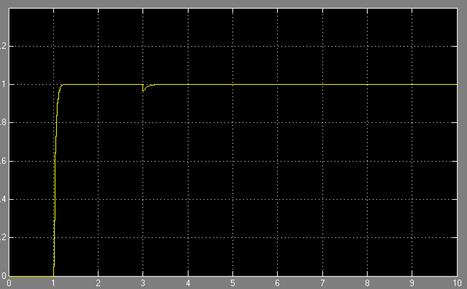
Рисунок 4.7 Переходные процессы при Jн =Jд без ПИ
|
|
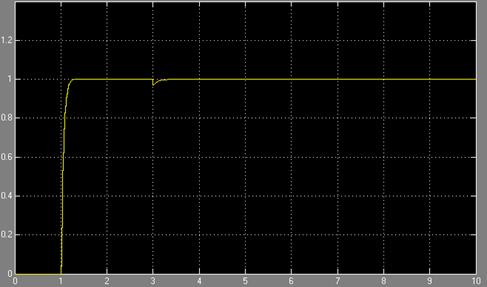
Рисунок 4.8 – переходные процессы при и Jн=Jд с ПИ
Предпримем попытку идентифицировать полученную систему, как апериодическое звено II порядка ![]() . При идентификации целесообразно использовать обратную частотную характеристику
. При идентификации целесообразно использовать обратную частотную характеристику ![]() , точнее квадрат её модуля
, точнее квадрат её модуля ![]() . Произведём замену
. Произведём замену ![]() ,
, ![]() , а коэффициенты
, а коэффициенты ![]() ,
, ![]() ,
, ![]() . В результате получим уравнение параболы
. В результате получим уравнение параболы ![]() .
.
Произведём ряд опытов с подачей в систему синусоидального воздействия единичной амплитуды и различной частоты.
![]()
|
|
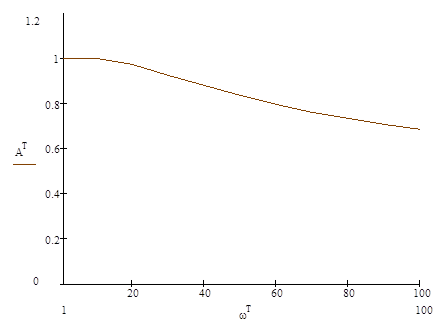
Рисунок 4.9 – Апмлитудно-частотная характеристика.
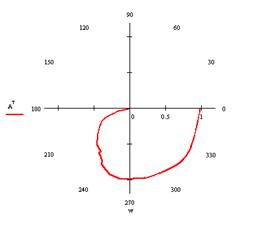
Рисунок 4.10 – Апмлитудно-фазовая характеристика.
В результате аппроксимации в параболу получили следующее уравнение:![]() .
.
Отсюда 
Тогда передаточная функция модели будет иметь вид:
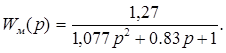
Преобразуем его в MathCADe в Z-форму
![]()
Реализуем полученную передаточную функцию в MATLAB 6