Курсовая работа: Идентификация параметра зазора при регулировании положения
Результаты реализации представлены на рисунке 4.12:
|
|
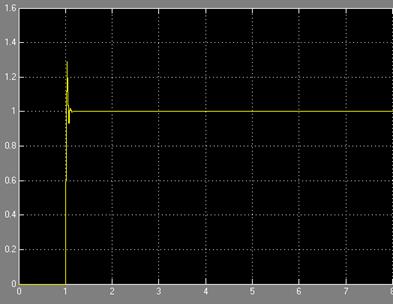
Рисунок 4.12 – Переходной процесс в объекте
Анализ графиков переходных процессов, представленных на рисунках 4.11 и 3.2 позволяет сделать вывод об их качественном сходстве, а следовательно и верности идентификации системы.
Выводы
В процессе курсовой работы были получены передаточные функции неизменяемой части, регулятора, была построена желаемая ЛАЧХ. Оценка качества регулирования была проведена на ЭВМ при помощи пакетов MatLABbMathCAD. В результате проверки можно сделать вывод об удовлетворительной работе системы при подаче на неё различных сигналов. В соответствии с заданием была разработана подсистема идентификации изменения момента инерции нагрузки. При её подключении заметно улучшилась реакция системы на нагрузку, уменьшилась динамическая ошибка. Была проведена идентификация системы цифрового электропривода как астатического звена второго порядка. По результатам сравнения модели и объекта можно судить о достаточно высокой точности идентификации.
Перечень ссылок
1. Лебедев А.М. «Следящие электроприводы станков с ЧПУ» - Москва 2000 г.
2. Лебедев А.М. «Моделирование в научно-технических исследованиях» - Москва 1999г.
3. Сердюк А.А. Лекции по курсу «Идентификация и моделирование технологических объектов» - ДГМА 2006 г.
4. Сердюк А.А. Методические указания к курсовому проектированию по дисциплине «Программное управление станков» - ДГМА 2004 г.