Курсовая работа: Плоский рычажной механизма
JS 2 = m2 * l2 2 /12 = 8,125 * 0,3252 /12 = 0,0715 кг*м2
JS 4 = m4 * l4 2 /12 = 5,5 * 0,222 /12 = 0,0222 кг*м2
JS 6 = m6 * l6 2 /12 = 5 * 0,22 /12 = 0,0167 кг*м2
Угловые ускорения звеньев 2, 4, 5 и 6 определяются по относительным тангенциальным ускорениям, поэтому:


Найдём моменты сил инерции 2, 4, 6 звеньев:
МИ2 = JS 2 * ![]() = 0,0715 * 82,22 = 5,88 Нм
= 0,0715 * 82,22 = 5,88 Нм
МИ4 = JS 4 * ![]() = 0,0222 * 42,73 = 0,95 Нм
= 0,0222 * 42,73 = 0,95 Нм
МИ6 = JS 4 * ![]() = 0,0167 * 35,6 = 0,59 Нм
= 0,0167 * 35,6 = 0,59 Нм
2.2 Силовой расчёт группы звеньев 6, 7.
Выделим из механизма группу звеньев 6, 7, расставим все реальные нагрузки и силы и моменты сил инерции.
Действие на рассматриваемую группу отброшенных звеньев заменим силами. В т.Е на ползун 7 действует сила со стороны стойки - направляющей ползуна. В отсутствии трения сила взаимодействия направлена перпендикулярно к контактирующим поверхностям, т. е. перпендикулярно направлению движения ползуна, а влево или вправо, пока не известно, поэтому направим эту силу предварительно вправо. Если после вычислений окажется, что она отрицательна, то необходимо изменить направление на противоположное.
В индексе обозначения ставятся две цифры: первая показывает со стороны какого звена действует сила, а вторая - на какое звено эта сила действует.
В точке D со стороны звена 5 на звено 6 действует сила R56 . Ни величина, ни направление этой силы неизвестны, поэтому определяем её по двум составляющим: одну направим вдоль звена и назовём нормальной составляющей, а вторую перпендикулярно звену и назовём тангенциальной составляющей. предварительное направление этих составляющих выбираем произвольно, а действительное направление определиться знаком силы после вычислений.
На ползун Е действует ещё сила полезного сопротивления, но она равна нулю.
Расставим на выделенной группе звеньев все перечисленные силы и определим неизвестные реакции в кинематических парах Е, D - RE и R56 .
Сначала определяем тангенциальную составляющую силы R56 из условия равновесия звена 6. Приравняв нулю сумму моментов сил относительно точки Е, получим:
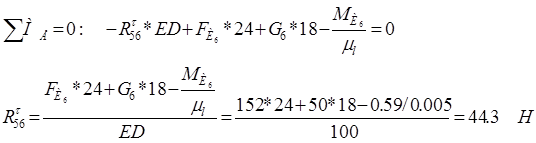
Момент сил инерции необходимо делить на ![]() потому, что звенья изображены в масштабе
потому, что звенья изображены в масштабе ![]() , и в расчётах используются их значения снятые с чертежа.
, и в расчётах используются их значения снятые с чертежа.
Нормальная составляющая силы R56 и сила RE находятся графическим методом из векторного многоугольника, построенного для группы звеньев 6, 7. Известно, что при силовом равновесии многоугольник, составленный из векторов сил, должен быть замкнутым:
![]()
Так как направления линий действия нормальной составляющей силы R56 и RE известны, то построив предварительно незамкнутый многоугольник из известных векторов сил, можно обеспечить его замыкание, если провести через начало первого и конец последнего вектора прямые, параллельные направлениям искомых сил. Точка пересечения этих прямых определит величины искомых векторов и их действительные направления.
Из построений видно, что направление силы R76 - от n к m, а силы R67 - от m к n.
Определим величины реакций в кинематических парах:
R56 = ![]() *
* ![]() = 1/4 * 209,7 = 52.43 Н
= 1/4 * 209,7 = 52.43 Н
RE =![]() *
* ![]() = 1/4 * 69,3 = 17.33 Н
= 1/4 * 69,3 = 17.33 Н
2.3 Силовой расчёт группы звеньев 5,4.