Курсовая работа: Плоский рычажной механизма
Неизвестными являются: сила взаимодействия 4 и 2 звена, сила взаимодействия 5 звена и стойки.
В точке С со стороны звена 2 на звено 4 действует сила R24 . Ни величина, ни направление этой силы неизвестны, поэтому определяем её по двум составляющим: одну направим вдоль звена и назовём нормальной составляющей, а вторую перпендикулярно звену и назовём тангенциальной составляющей. предварительное направление этих составляющих выбираем произвольно, а действительное направление определиться знаком силы после вычислений.
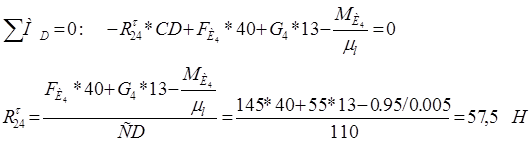
Сначала определяем тангенциальную составляющую силы R24 из условия равновесия звена 4. Приравняв нулю сумму моментов сил относительно точки D, получим:
Нормальная составляющая силы R24 и сила RO 1 находятся графическим методом из векторного многоугольника, построенного для группы звеньев 5, 4. Известно, что при силовом равновесии многоугольник, составленный из векторов сил, должен быть замкнутым:
![]()
Так как направления линий действия нормальной составляющей силы R24 и RO 1 известны, то построив предварительно незамкнутый многоугольник из известных векторов сил, можно обеспечить его замыкание, если провести через начало первого и конец последнего вектора прямые, параллельные направлениям искомых сил. Точка пересечения этих прямых определит величины искомых векторов и их действительные направления.
Определим величины реакций в кинематических парах:
R24 = ![]() *
* ![]() = 1 * 26.6 = 26.6 Н
= 1 * 26.6 = 26.6 Н
RO 1 =![]() *
* ![]() = 1 * 276.6 = 276.6 Н
= 1 * 276.6 = 276.6 Н
2.4 Силовой расчёт группы звеньев 2, 3.
Выделим из механизма группу звеньев 2, 3, расставим все реальные нагрузки и силы и моменты сил инерции, реакции отброшенных звеньев. В точке C действует сила R24 , которая равна R24 и направлена противоположно ей.
Неизвестными являются: сила взаимодействия 1 и 2 звена, сила взаимодействия 2 звена и ползуна.
В точке С со стороны звена 1 на звено 2 действует сила R12 . Ни величина, ни направление этой силы неизвестны, поэтому определяем её по двум составляющим: одну направим вдоль звена и назовём нормальной составляющей, а вторую перпендикулярно звену и назовём тангенциальной составляющей. предварительное направление этих составляющих выбираем произвольно, а действительное направление определиться знаком силы после вычислений.
Сначала определяем тангенциальную составляющую силы R12 из условия равновесия звена 2. Приравняв нулю сумму моментов сил относительно точки А, получим:

Нормальная составляющая силы R12 и сила RВ находятся графическим методом из векторного многоугольника, построенного для группы звеньев 2, 3. Известно, что при силовом равновесии многоугольник, составленный из векторов сил, должен быть замкнутым:
![]()
Так как направления линий действия нормальной составляющей силы R24 и RO 1 известны, то построив предварительно незамкнутый многоугольник из известных векторов сил, можно обеспечить его замыкание, если провести через начало первого и конец последнего вектора прямые, параллельные направлениям искомых сил. Точка пересечения этих прямых определит величины искомых векторов и их действительные направления.
Определим величины реакций в кинематических парах:
R12 = ![]() *
* ![]() = 1/2 * 377,8 = 188,9 Н
= 1/2 * 377,8 = 188,9 Н
RВ =![]() *
* ![]() = 1/2 * 55,4 = 27,7 Н
= 1/2 * 55,4 = 27,7 Н
2.5 Силовой расчёт ведущего звена.
Ведущее звено обычно уравновешено, то есть центр масс его находится на оси вращения. Для этого требуется, чтобы сила инерции противовеса, установленного на продолжении кривошипа ОА, равнялась силе инерции звена ОА:
m = M1 /lOA = 3.125/0.125 = 25 кг - масса единицы длины.
Отсюда можно определить массу противовеса m1 , задавшись её расстоянием r1 от оси вращения. При r1 = 0,5 * lm1 = M1 (масса звена ОА).
В точке А на 1 звено со стороны 2 звена действует сила R21 , момент которой относительно точки О равен уравновешивающему моменту.
![]()