Курсовая работа: Проектирование системы автоматического регулирования угла поворота вала электродвигателя
Где 
Легко показать, что ![]() .
.
W(s) = ![]() =1
=1
Найдём передаточные функции ![]() - передаточную функцию двигателя по управлению от напряжения
- передаточную функцию двигателя по управлению от напряжения ![]() до угловой скорости
до угловой скорости ![]() и
и ![]() - передаточную функцию двигателя по возмущению.
- передаточную функцию двигателя по возмущению.
![]() (2.14)
(2.14)
Тогда ![]() (2.15)
(2.15)
При ![]() , имеем:
, имеем:
![]() , (2.16)
, (2.16)
В тоже время, ![]() , следовательно:
, следовательно:
 (2.17)
(2.17)
Выразим параметры передаточной функции через технические характеристики двигателя. Уравнение статической характеристики двигателя:

где u – неравномерность хода, другая важная характеристика ДПТ - жесткость механической характеристики двигателя b -1 . Жесткость определяет степень не параллельности ( угла наклона) характеристики.
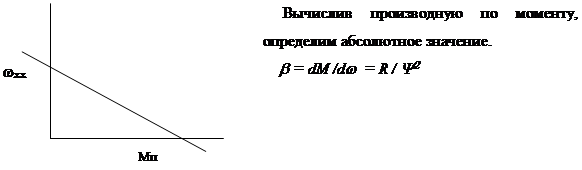
Для характеристики ДПТ b = Mn/ w хх
где Мn – пусковой момент, когда угловая скорость равна нулю. Mn должен быть ![]() .
.
Мn= 3∙Мном= 3.6
b =Mn/ w хх =0.0086
Передаточная функция в канале управления – это передаточная функция от напряжения до угловой скорости вращения якоря.
![]() (2.18)
(2.18)
Где 
Постоянная времени в цепи якоря Tя характеризует долю реактивной составляющей относительно активной.
Таким образом, получаем:
![]() (2.19)
(2.19)
Передаточная функция в канале возмущения – это передаточная функция от момента сопротивления на валу двигателя до той же самой угловой скорости. В тоже время, ![]() , следовательно:
, следовательно:
 (2.20)
(2.20)
где ![]()
3 РАСЧЕТ РЕГУЛЯТОРА
Первая проблема – это проблема качества и точности, а, следовательно, проблема выбора коэффициента усиления k. Коэффициент усиления выбирается, исходя из требований точности, которые определяются ограничением на установившуюся ошибку. Необходимо учитывать действие момента нагрузки. Для этого рассмотрим следующую упрощенную структурную схему нашей системы стабилизации угла.
|
|
![]()
![]()
![]()
![]()