Курсовая работа: Проектирование системы автоматического регулирования угла поворота вала электродвигателя
![]() (4.6)
(4.6)
то передаточная функция регулятора:
![]()
Так как ![]() , то передаточную функцию регулятора можно представить в виде форсирующего звена:
, то передаточную функцию регулятора можно представить в виде форсирующего звена:
![]() (4.7)
(4.7)
где  .
.
![]() (4.8)
(4.8)
![]()
Или ![]() , (4.9)
, (4.9)
![]() (4.10)
(4.10)
Логарифмическая амплитудно-частотная характеристика регулятора представлена на рисунке 4.1.
4.4 Проверка устойчивости и качеств переходного процесса
Для оценки качества и точности системы с полученным корректирующим звеном построим переходный процесс системы с коррекцией, предварительно получив передаточную функцию замкнутой системы.
После коррекции, система имеет передаточную функцию прямой цепи ![]() , определяемую по (4.9). Следовательно, передаточная функция замкнутой цепи имеет вид:
, определяемую по (4.9). Следовательно, передаточная функция замкнутой цепи имеет вид:

![]()
Определим устойчивость этой системы по критерию Гурвица. Для этого составляем определитель.
![]()

D1=63998944602>0
D2=2740854>0
D3=546>0
D4=2.88>0
=> Система устойчива.
Переходный процесс замкнутой системы:
Рисунок 4.2 – Переходный процесс замкнутой системы
 |
Из рисунка 4.2 видно, что переходный процесс на выходе полученной системы удовлетворяет требуемым характеристикам: ![]() ,
, ![]() .
.
С помощью годографа Найквиста найдем запасы по амплитуде и фазе (рисунок 4.3).
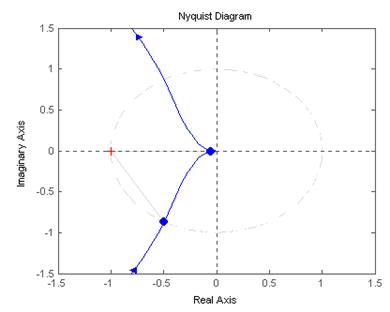 |
Рисунок 4.3 – Годограф Найквиста
Запас по амплитуде Аз = 25.2 дБ (при w* = 186 рад/с),