Курсовая работа: Проектирование системы автоматического регулирования угла поворота вала электродвигателя
Реальное корректирующее устройство содержит балластное апериодическое звено, в данном случае - первого порядка с единичным коэффициентом усиления и постоянной времени ТВ =0,01Т.
Wb(s)=![]() – передаточная функция балластного звена (апериодическое звено первого порядка).
– передаточная функция балластного звена (апериодическое звено первого порядка).

Оценим влияние балластного звена, построив переходную характеристику системы.
Рисунок 4.4 - Переходный процесс системы с балластным звеном
Таким образом, как видно из графика переходного процесса рисунка 4.4, балластное звено значительно влияет на перерегулирование, которое увеличилось почти в два раза, и лишь немного - на время регулирования:
![]() ,
, ![]() .
.
5 РЕАЛИЗАЦИЯ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
Реализовать физически корректирующее звено с передаточной функцией (4.8) можно с помощью следующей схемы.
 |
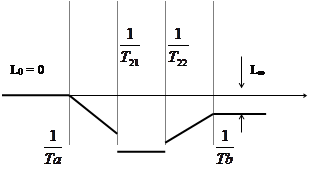 |
Рисунок 4.4 – Схема реализации корректирующего звена, соответствующего ЛАЧХ регулятора
![]() , T22 < T21
, T22 < T21
 |
 |
Параметры Т21 , Т22 , 1 , 2 определяются следующими выражениями:
![]()
 ;
;
Для полученного регулятора
Параметры элементов схемы, представленной на рисунке 5.3 определяются следующим образом.
Выбор элементов.
КУ1 = 1, КУ2 = 1.
Конденсатор С1 принадлежит классу электролитических конденсаторов (КЭ), отличающихся малыми размерами при большой емкости, но имеющих довольно большие токи утечки и потери.
Примем
С1 = 0.0005 (Ф) = 500 (мкФ), тогда
R1 = 460 (Ом),
R2 = 25 (Ом),
R3 = 399104 (Ом) = 399.1 (кОм),
С2 = 0.6 (мкФ).
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте спроектирована система автоматического регулирования угла поворота вала электродвигателя. Объектом управления такой системы является вращающийся вал, нагруженный моментом ![]() . Цель управления состоит в обеспечении угла
. Цель управления состоит в обеспечении угла ![]() поворота вала ЭД, близкого к заданной величине
поворота вала ЭД, близкого к заданной величине ![]() , которая может изменяться во времени. Для достижения этой цели спроектирована система с обратной связью.
, которая может изменяться во времени. Для достижения этой цели спроектирована система с обратной связью.
Оценки качества и точности проектируемой системы удовлетворяют техническому заданию:
ошибка от помехи |eN | ![]() 0.5;
0.5;
минимальная частота помехи ![]() = 310 (рад/c);
= 310 (рад/c);
время регулирования tР ![]() 2 (с);
2 (с);
перерегулирование системы s ![]() 15%.
15%.