Курсовая работа: Разработка следящей системы промышленного робота
В нашем случае все условия критерия выполняются, т. е. алгоритм построения таблицы Рауса регулярен, и все числа в первом столбце – одного знака и положительны, то можно сделать вывод, что система устойчива. Поэтому интервал [0 .. 950] можно считать устойчивым.
Подберем такое К при котором прямой показатель качества – колебательность – не превышает заданного придела μ =1,5. К=165
![]()
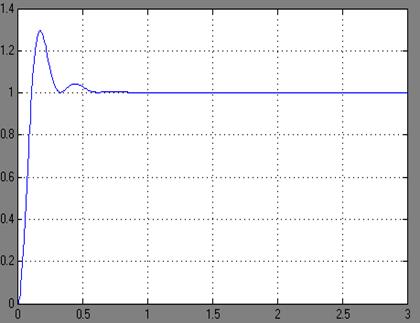
Рисунок 4.3 - График переходного процесса при К=165
Возьмем пять значений параметра К из этого интервала[0 .. 950]. Это делается для анализа показателей качества.К=100
![]()
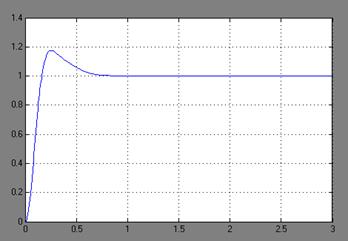
Рисунок 4.4 - График переходного процесса при К = 100 tP = 0.5, σ = 1,19 К = 150
![]()
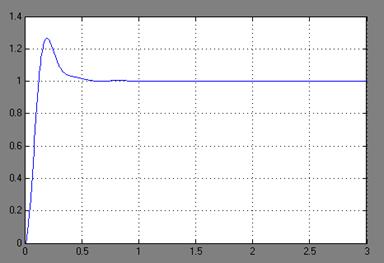
Рисунок 4.5 - График переходного процесса при К = 150, tP = 0.30, σ = 1,25 К = 180
![]()
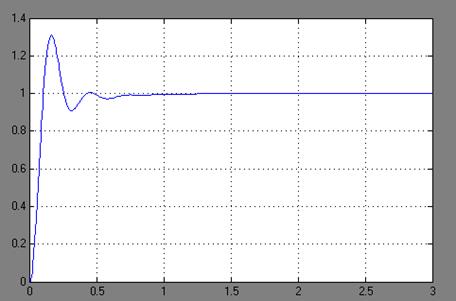
Рисунок 4.6 - График переходного процесса при К = 180
К=200
![]()
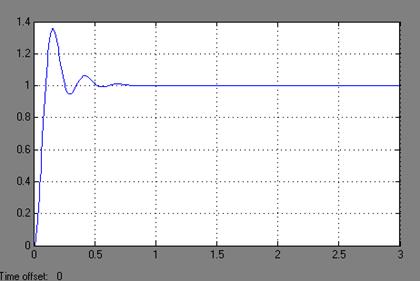
Рисунок 4.7 - График переходного процесса при К = 200, tP = 0.25, σ = 1,35
К=400
![]()
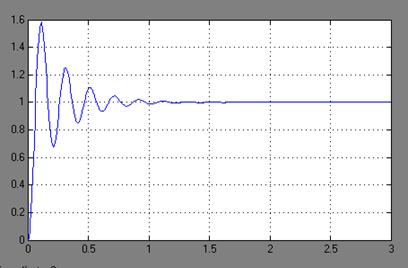
Рисунок 4.8 - График переходного процесса при К = 400, tP = 0.52, σ = 1,6
В результате построений переходных процессов при различных К можно сделать вывод, что при увеличении К перерегулирование будет увеличиваться; время регулирования при К = 100, К =150, К = 180 будет уменьшатся до К = 200, а после при К = 400 оно снова будет возрастать.
5 АНАЛИЗ ВЛИЯНИЯ НЕ ЛИНЕЙНОСТИ
Для анализа влияния нелинейности характеристик элементов следящей системы на её динамические свойства необходимо предварительно ввести в структурную схему системы нелинейные элементы.
Необходимо ввести в сервопривод нелинейный элемент (НЭ). Нелинейность можно задать функцией, отображаемой графиком, представленным на рисунке 5.1:
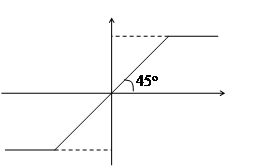 |
Рисунок 5.1 – Функция нелинейности
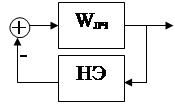
Нелинейный элемент имеет характеристику с насыщением, без зоны нечувствительности. Угол наклона характеристики должен быть 45°, т.к. нелинейный элемент повторяет входной сигнал до достижения значения выхода dр.огр = А = 0,2°. Рассмотрим схему, представленную на рисунке 5.2:
Необходимо установить, возможно ли возникновение автоколебаний в такой системе. Данную задачу можно решить с помощью метода гармонического баланса, однако для этого исходную схему необходимо привести к виду, представленному на рисунке 5.3:
 |