Реферат: Синтез и анализ аналоговых и цифровых регуляторов
Курсовой работа. ___ листов , ___ рисунков, ____таблицы, ____ источника, ____ приложение.
Передаточная функция, переходная функция, регулятор, фиксатор нулевого порядка, оптимальное управление, цифровой -фильтр.
В данном курсовой работе предложено синтезировать и проанализировать работу одноконтурной САУ при использовании непрерывного и цифрового регуляторов, реализующих П-, ПИ- и ПИД- закон регулирования. Оптимизация САУ производится по критерию максимальной динамической точности. В завершении был рассчитан цифровой фильтр, обеспечивающий перевод системы из одного состояния в другое за минимальное число периодов квантования при наличии ограничения на управляющие воздействие.
СОДЕРЖАНИЕ
| Введение |
| 1 Определение параметров оптимальной настройки регуляторов |
| 2 Переходные процессы в замкнутой системе при использовании непрерывного регулятора и их анализ |
| 3 Определение периода квантования цифрового регулятора и его параметров настройки |
| 4 Анализ устойчивости САУ по критерию Джури и построение переходных процессов в цифровых системах |
| 5 Расчет цифрового фильтра |
| 6 Оптимальное управляющие воздействие и реакция на него приведенной непрерывной части |
| Заключение |
| Список литературы |
| Приложение А |
Введение
Развитие всех областей техники в настоящее врамя характкризуется широкой автоматизацией различных производственных процессов. При этом освобождается труд человека, повышается точность и скорость выполнения операций, что значительно повышает производительность производства.
Автоматизация обеспечивает работу таких обьектов, непосредственое обслуживание человеком невозможно из-за вредности, отдаленности или быстрого протекания процесса.
В настоящее время резко увеличивается производство различного оборудования для автоматизации промышленности, а также внедряются новые типы автоматических устроиств, основанные на последних достижениях науки и техники. Эффективное использование автоматики в народном хозяйстве возможно лишь при условии рационального решения задач на всех этапах ее разработки и освоения. Наиболее ответственным этапом при проектировании систем автоматизации является их синтез, расчет и последующий анализ, которые на сегодняшний день базируются на теории управления. Эта наука позволяет не только найти параметры, при которых система работает устойчиво, различные качественные показатели системы, но также и оптимизировать систему для более рационального использования различных ресурсов.
1ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ НАСТРОЙКИ РЕГУЛЯТОРОВ
Определение оптимальных параметров настройки П, ПИ, ПИД - регуляторов производим по расширенных амплитудно-фазовым характеристикам.
Расширенной амплитудно-фазовой характеристикой звена или системы называют отношение вектора гармонических вынужденных затухающих колебаний на входе к вектору гармонических затухающих колебаний на входе.
Существуют два показателя степени затухания:
Y - относительная степень затухания;
m - логарифмический декремент затухания, которые связаны между собой следующим далее соотношением:
![]() , (1.1)
, (1.1)
Из предыдущей формулы (1.1) определяем значение логарифмического декремента затухания m:
![]() , (1.2)
, (1.2)
Система автоматического управления будет обладать требуемой относительной степенью затухания, если расширенная амплитудно-фазовая характеристика разомкнутой система автоматического управления будет проходить через точку на комплексной плоскости (-1, j0), т.е.
Wp (m,jw)* Wo (m,jw) = -1, (1.3)
или
-Wp (m,jw) = 1/ Wo (m,jw), (1.4)
Для получения расширенной амплитудно-фазовой характеристики необходимо в передаточную функцию подставить:
p = -mw + jw = w(j-m).
 |
Рисунок 1.1 Структура схемы непрерывной САУ
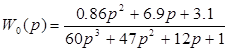
Передаточная функция нашего исходного объекта имеет следующий далее вид:
 , (1.5)
, (1.5)
![]() , (1.6)
, (1.6)
Формула (1.6) представляет собой инверсную расширенную амплитудно - фазовой характеристику обьекта.

Так как заданое значение Y = 0.96, то по формуле (1.2) определим значение m и подставим его в предыдущую формулу расширенной амплитудно-фазовой характеристики, m = 0.512.

Перед тем, как определить оптимальные параметры настройки П, ПИ, ПИД регуляторов найдем частоту среза нашего обьекта.
Частота среза – это такое значение частоты w = wc , при котором значение амплитуды на выходе на превышало бы трех процентов от амплитуды при нулевой частоте.
Запишем выражение амплитудно - фазовой характеристики нашего обьекта:
 , (1.7)
, (1.7)
Амплитудно-фазовую характеристику обьекта можно найти из следующей формулы:
![]() , (1.8)
, (1.8)
где Re(w) – вещественная часть амплитудно-фазовой характеристики;
Jm(w) – мнимая часть амплитудно-фазовой характеристики.
 .
.
При нулевой частоте значение амплитуды равно 3.1 . Значит необходимо найти такое w = wс , чтобы ![]() = 0.03*3.1 = 0.093.
= 0.03*3.1 = 0.093.
Таким образом необходимо расчитать уравнение
 , (1.9)
, (1.9)
Решением этого уравнения является то, что мы находим следующие параметры w = 0.417, следовательно и wc = 0.417.
Для опреления оптимальных параметров регулятора необходимо решить уравнение (1.6). Приравняв вещественные и мнимые части в уравнении (1.6), можэно получить расчетные формулы для определения параметров регуляторов [4, ст 250]:
- П – регулятор:

- Пи – регулятор:
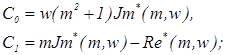
- Пид – регулятор:

![]()
где С0 = 1/Tu ;
--> ЧИТАТЬ ПОЛНОСТЬЮ <--