Учебное пособие: Теория автоматического управления Структурная схема
1 + 0.48Ку
Если задан требуемый коэффициент статизма, то нетрудно определить коэффициент передачи регулятора, при котором он обеспечивается.
Например, из (4.2) следует
0.4 - Кс
Ку = ----------------------- (4.3)
0.48Кс
Найденное требуемое значение коэффициента передачи регулятора обычно округляется до ближайшего целого значения (чтобы легче было устанавливать) и определяется действительное значение коэффициента статизма.
По найденному значению коэффициента статизма легко может быть построена статическая (внешняя) характеристика САУ. Например, на рис.4.1, приведена статическая характеристика САУ, представленной на рис.3.1, при Ку = 20.
С целью сравнения дана также статическая характеристика объекта управления, что соответствует характеристике разомкнутой САУ.
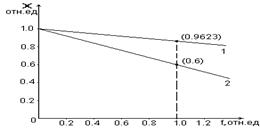
Рис.4.1. Статическая характеристика САУ по рис.3.1 при Ку=20 (линия 1) и объекта управления (линия2).
Для статических САУ коэффициент статизма по задающему воздействию, численно равный ошибке воспроизведения этого воздействия, зависит также от значения коэффициента передачи её по задающему воздействию. Так для САУ по рис.3.1 (см. также рис.3.2,б) с учётом (3.2)
1 1
К’c = = 1.0 - lim Wз2 (P) = lim --------------------- = ------------------------
P®0 P®0 1+Wp(P) 1 + 0.48Ку
При Ку = 20 К’с = e = 0.094.
Это означает, что если при отсутствии возмущающего воздействия (например, холостой ход объекта управления) на вход рассматриваемой САУ подать задающее воздействие DZ = 1.0, то управляемая величина на выходе в установившемся режиме будет иметь значение
x = 1.0 - e = 1.0 - 0.094 = 0.906.
За счёт возмущающего воздействия Df это значение x ещё уменьшится на величину Кс Df.
Следует иметь в виду, что если замкнутая САУ имеет последовательно включенное интегрирующее звено, не охваченное жёсткой обратной связью, то она является астатической по задающему воздействию, т.е. безошибочно воспроизводит это воздействие (К’с = e =0).
5. ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА
По переходной характеристике определяются динамические показатели качества управления (регулирования):
- время переходного процесса tп ;
- перерегулирование g;
- колебательность G.
В реальных линейных САУ управляемая величина асимптотически приближается к установившемуся значению, т. е. теоретически tп = ¥. Поэтому, исходя из практических соображений, под временем переходного процесса понимают интервал времени, по истечении которого (от момента подачи воздействия) начинает выполняться условие
|Dx(t) - Dx|£D,
где Dx(t) - текущее значение управляемой величины;
Dx - установившееся отклонение;
D - наперёд заданное значение допустимого отклонения управляемой величины от нового установившегося значения.