Курсовая работа: Исследование линейных и нелинейных систем управления
dY1 =
-1
Согласно критерию управляемости Калмана исследуемая система полностью управляема, так как ранг матрицы управляемости равен размеру вектора переменных состояния. Определитель матрицы управляемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью управляема.
3.1.4 Оценка наблюдаемости САР с П-регулятором
Оценку наблюдаемости САР будем проводить с помощью критерия наблюдаемости Калмана. Матрица наблюдаемости имеет следующий вид:
 |
Script 14:
>> H1=[C1; C1*A1; C1*A1^2]
H1 =
0.0174 0.0555 0.0071
-0.0001 0.0166 0.0523
-0.0011 -0.0063 -0.0065
>> rH1=rank(H1)
rH1 =3
>> dH1=det(H1)
dH1 =
8.5991e-007
Согласно критерию наблюдаемости Калмана исследуемая система полностью наблюдаема, так как ранг матрицы наблюдаемости равен размеру вектора переменных состояния. Определитель матрицы наблюдаемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью наблюдаема.
3.2 Анализ САР с ПИ-регулятором
3.2.1 Разработка математической модели типа «вход-состояние-выход»
Основная передаточная функция САР с ПИ-регулятором была получена в п. 1.4. Она имеет вид:
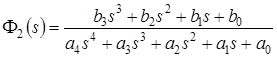 ,
,
где ![]() ,
,
![]() .
.
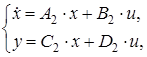
Порядок характеристического полинома ![]() . Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:
. Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:
 |
где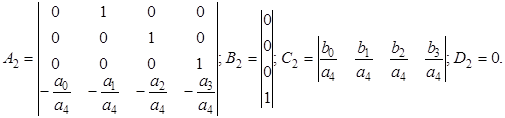
Script 15:
>> b3=1.089;b2=8.558;b1=3.348;b0=0.2156;
>> a4=336;a3=147.1;a2=29.56;a1=4.348;a0=0.2156;
>> A2=[0 1 0 0;0 0 1 0;0 0 0 1;-a0/a4 -a1/a4 -a2/a4 -a3/a4];
>> B2=[0;0;0;1];