Курсовая работа: Исследование линейных и нелинейных систем управления
Рисунок 7 – Переходная характеристика САР с ПИД-регулятором
По формуле (3) определяем степень затухания ψ
Script 9:
>> ((1.33-1)-(1.05-1))/(1.33-1)
ans =0.8485
Полученная степень затухания примерно совпадает с заданной, значит параметры настройки регулятора выбраны верно.
2 Анализ переходных характеристик линейной САР
2.1 Оценка качества САР по каналу управляющего воздействия
По переходным характеристикам, полученным в пунктах 1.3-1.5 определим следующие показатели качества:
ymax 1 – амплитуда первого максимума;
ymax 2 – амплитуда второго максимума;
yуст – установившееся значение;
σ – перерегулирование;
ε – статическое отклонение.
tp – время регулирования;
tn – время нарастания;
tmax – время достижения первого максимума;
æ – декремент затухания;
T – период колебаний;
ω – частота колебаний;
n – колебательность;
Таблица 1 – Показатели качества САР по каналу управляющего воздействия
| Регуляторы | ymax 1 | ymax 2 | yуст | σ | ε | tp | tn | tmax | æ | T | ω | n |
| П | 1.14 | 0.895 | 0.854 | 33.6 | 0.146 | 41.7 | 5.23 | 12.3 | 6.98 | 24.7 | 0.25 | 1.5 |
| ПИ | 1.31 | 1.04 | 1 | 31 | 0 | 62.3 | 8.11 | 19.4 | 7.75 | 35.9 | 0.175 | 1.5 |
| ПИД | 1.33 | 1.05 | 1 | 32.6 | 0 | 50.3 | 6.33 | 14.3 | 6.6 | 29.7 | 0.21 | 1.5 |
Декремент затухания и частоту колебаний определяем по формулам
æ |
Проанализировав полученные данные, можно сделать вывод, что каждая САР обладает своим рядом преимуществ и недостатков. САР с П-регулятором имеет наименьшее отклонение по амплитуде, но обладает статической ошибкой. У САР с ПИ-регулятором нет статической ошибки, но она имеет наибольшее время регулирования. САР с ПИД-регулятором наиболее быстродействующая, но она также обладает и наибольшим перерегулированием.
2.2 Оценка качества САР по каналу возмущающего воздействия
Для оценки качества САР по каналу возмущающего воздействия преобразуем структурную схему САР (рисунок 8).
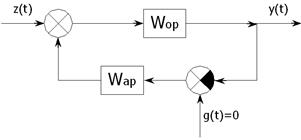
Рисунок 8 – Структурная схема преобразованной САР
Определим передаточную функцию САР по возмущающему каналу:
Script 10:
>> Fiz1=feedback(Wop,Wap1)