Курсовая работа: Исследование линейных и нелинейных систем управления
y1 0.01744 0.05548 0.007134
d =
u1
y1 0
Continuous-time model.
>> step(sys1);grid
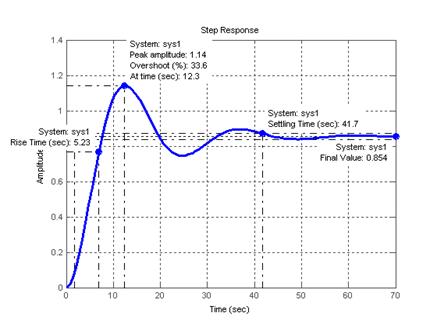
Рисунок 9 – Переходная характеристика САР с П-регулятором
При исользовании модели «вход-выход» и модели «вход-состояние-выход» были получены абсолютно идентичные переходные характеристики (рисунки 4 и 9), следовательно, модель «вход-состояние-выход» для САР с П-регулятором рассчитана, верно.
3.1.2 Структурная схема САР с П-регулятором
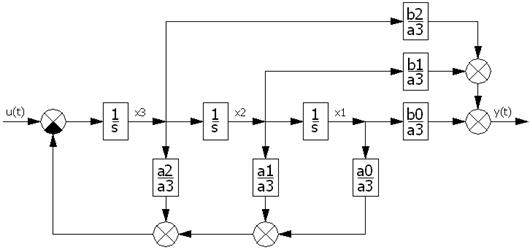
Рисунок 10 – Структурная схема САР с П-регулятором
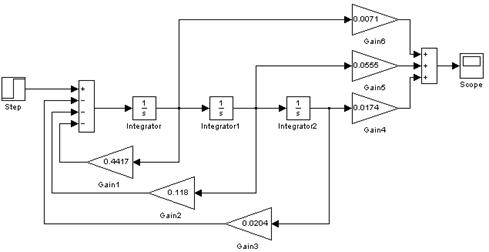
Рисунок 11 – Схема s-модели САР с П-регулятором
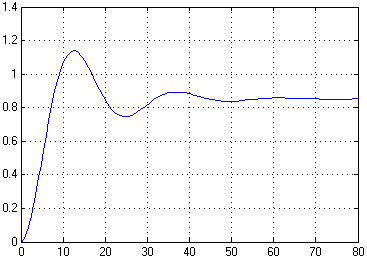
Рисунок 12 – Переходная характеристика САР с П-регулятором
Переходная характеристика, полученная по s-модели САР с П-регулятором с помощью пакета Simulink системы MATLAB совпадает с полученными ранее переходными характеристиками, значит s-модель построена верно.
3.1.3 Оценка управляемости САР с П-регулятором
Оценку управляемости САР будем проводить с помощью критерия управляемости Калмана. Матрица управляемости имеет следующий вид:
|
Script 13:
>> Y1=[B1 A1*B1 A1^2*B1]
Y1 =
0 0 1.0000
0 1.0000 -0.4417
1.0000 -0.4417 0.0771
>> rY1=rank(Y1)
rY1 =
3