Курсовая работа: Исследование линейных и нелинейных систем управления
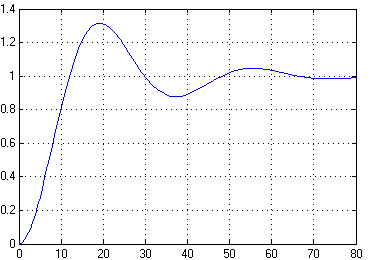
Рисунок 16 – Переходная характеристика САР с ПИ-регулятором
Переходная характеристика, полученная по s-модели САР с ПИ-регулятором с помощью пакета Simulink системы MATLAB совпадает с полученными ранее переходными характеристиками, значит s-модель построена, верно.
3.2.3 Оценка управляемости САР с ПИ-регулятором
Оценку управляемости САР будем проводить с помощью критерия управляемости Калмана. Матрица управляемости имеет следующий вид:
Script 16:
>> Y2=[B2 A2*B2 A2^2*B2 A2^3*B2]
Y2 =
0 0 0 1.0000
0 0 1.0000 -0.4378
0 1.0000 -0.4378 0.1037
1.0000 -0.4378 0.1037 -0.0198
>> rY2=rank(Y2)
rY2 =4
>> dY2=det(Y2)
dY2 = 1
Согласно критерию управляемости Калмана исследуемая система полностью управляема, так как ранг матрицы управляемости равен размеру вектора переменных состояния. Определитель матрицы управляемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью управляема.
3.2.4 Оценка наблюдаемости САР с ПИ-регулятором
Оценку наблюдаемости САР будем проводить с помощью критерия наблюдаемости Калмана. Матрица наблюдаемости имеет следующий вид:
 |
Script 17:
>> H2=[C2; C2*A2; C2*A2^2; C2*A2^3]
H2 =
0.0006 0.0100 0.0255 0.0032
-0.0000 0.0006 0.0097 0.0241
-0.0000 -0.0003 -0.0015 -0.0009
0.0000 -0.0000 -0.0002 -0.0011
>> rH2=rank(H2)
rH2 =4
>> dH2=det(H2)