Курсовая работа: Исследование линейных и нелинейных систем управления
>> D2=0;
>> sys2=ss(A2,B2,C2,D2)
a =
x1 x2 x3 x4
x1 0 1 0 0
x2 0 0 1 0
x3 0 0 0 1
x4 -0.0006417 -0.01294 -0.08798 -0.4378
b =
u1
x1 0
x2 0
x3 0
x4 1
c =
x1 x2 x3 x4
y1 0.0006417 0.009964 0.02547 0.003241
d =
u1
y1 0
Continuous-time model.
>> step(sys2);grid
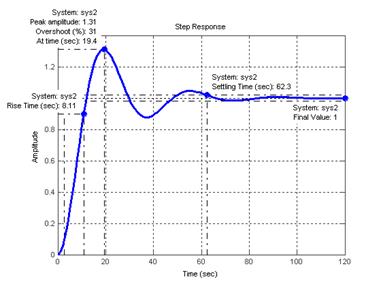
Рисунок 13 – Переходная характеристика САР с ПИ-регулятором
При исользовании модели «вход-выход» и модели «вход-состояние-выход» были получены абсолютно идентичные переходные характеристики (рисунки 5 и 13), следовательно, модель «вход-состояние-выход» для САР с ПИ-регулятором рассчитана верно.
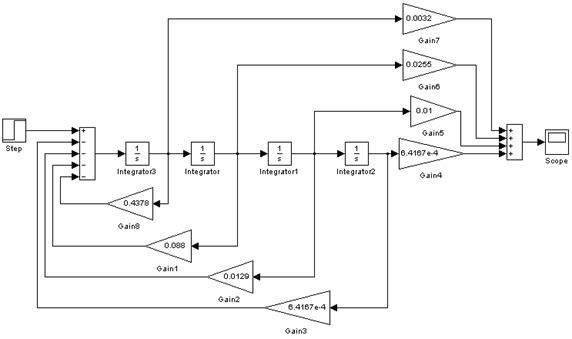
3.2.2 Структурная схема САР с ПИ-регулятором
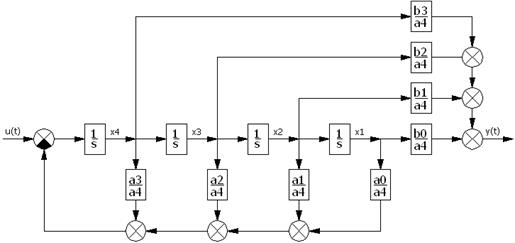
Рисунок 14 – Структурная схема САР с ПИ-регулятором