Курсовая работа: Исследование линейных и нелинейных систем управления
0.9 s^2 + 7 s + 2.2
-------------------------------------
336 s^3 + 148.4 s^2 + 39.64 s + 6.859
>> Fiz2=feedback(Wop,Wap2)
Transfer function:
0.9 s^3 + 7 s^2 + 2.2 s
--------------------------------------------------
336 s^4 + 147.1 s^3 + 29.56 s^2 + 4.348 s + 0.2156
>> Fiz3=feedback(Wop,Wap3)
Transfer function:
0.9 s^3 + 7 s^2 + 2.2 s
-----------------------------------------------
337.8 s^4 + 162.1 s^3 + 40 s^2 + 6.77 s + 0.396
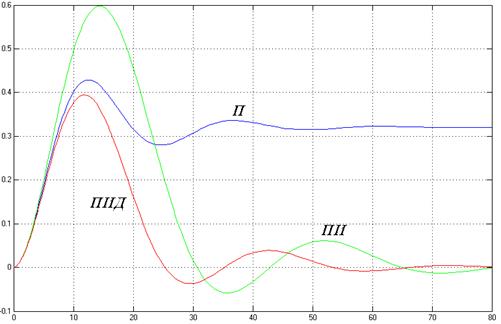
Рисунок 8 – Переходные характеристики САР по каналу возмущающего воздействия
Таблица 2 – Показатели качества САР по каналу возмущающего воздействия
| Регуляторы | ymax 1 | ymax 2 | yуст | σ | ε | tp | tn | tmax | æ | T | ω | n |
| П | 0.429 | 0.336 | 0.321 | 33.6 | 0.321 | 41.7 | 5.23 | 12.3 | 0.86 | 24.6 | 0.26 | 1.5 |
| ПИ | 0.598 | 0.061 | 0 | ¥ | 0 | 73.5 | 0 | 14.3 | 0.898 | 37.7 | 0.167 | 2 |
| ПИД | 0.39 | 0.04 | 0 | ¥ | 0 | 49 | 0 | 14 | 0.897 | 30 | 0.21 | 1.5 |
Проанализировав полученные данные, можно сделать вывод, что по каналу возмущающего воздействия САР с П-регулятором имеет наименьшее отклонение по амплитуде, но обладает статической ошибкой. У САР с ПИ-регулятором нет статической ошибки, но она имеет наибольшее время регулирования. САР с ПИД-регулятором наиболее быстродействующая.
2.3 Оценка запаса устойчивости САР
Для оценки запаса устойчивости применим логарифмический критерий. При проектировании САР рекомендуемый запас устойчивости по амплитуде ∆L>6 Дб, по фазе ∆φ>300 .
Script 11:
>> [Gm1,Pm1]=margin(W1);
>> [Gm2,Pm2]=margin(W2);
>> [Gm3,Pm3]=margin(W3);
>> [20*log10(Gm1),Pm1]
ans =
Inf 41.6235
>> [20*log10(Gm2),Pm2]
ans =
Inf 36.7183
>> [20*log10(Gm3),Pm3]