Курсовая работа: Исследование линейных и нелинейных систем управления
ans = 0.8566
Полученная степень затухания примерно совпадает с заданной, значит коэффициент передачи выбран верно.
1.3 Расчет параметров настройки ПИ-регулятора
Передаточная функция ПИ-регулятора определяется по формуле
Коэффициенты kp и ki определяем по кривой равной степени затухания (рисунок 3). kp = 1.21 и ki = 0.098. Тогда передаточная функция ПИ-регулятора будет иметь вид
![]() .
.
Построим переходную характеристику САР с ПИ-регулятором.
Script 5:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> Wap2=tf([1.21 0.098],[1 0]);
>> W2=series(Wap2,Wop)
Transfer function:
1.089 s^3 + 8.558 s^2 + 3.348 s + 0.2156
----------------------------------------
336 s^4 + 146 s^3 + 21 s^2 + s
>> Fi2=feedback(W2,1)
Transfer function:
1.089 s^3 + 8.558 s^2 + 3.348 s + 0.2156
--------------------------------------------------
336 s^4 + 147.1 s^3 + 29.56 s^2 + 4.348 s + 0.2156
>> step(Fi2);grid
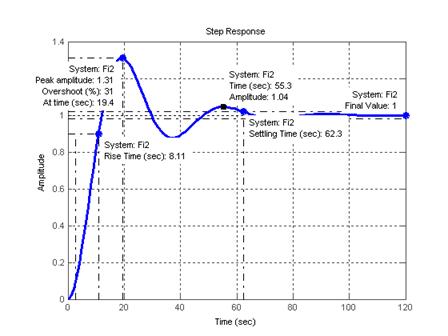
Рисунок 5 – Переходная характеристика САР с ПИ-регулятором
По формуле (3) определяем степень затухания ψ
Script 6:
>> ((1.31-1)-(1.04-1))/(1.31-1)
ans = 0.8710
Полученная степень затухания примерно совпадает с заданной, значит параметры настройки регулятора выбраны верно.
1.4 Расчет параметров настройки ПИД-регулятора
Передаточная функция ПИД-регулятора определяется по формуле
где ![]() .
.