Курсовая работа: Исследование линейных и нелинейных систем управления
Script 7:
>> w=0.15:0.001:0.26;
>> Wex=(0.9*((j-m).*w).^2+7*(j-m).*w+2.2)./ ...
(336*((j-m).*w).^3+146*((j-m).*w).^2+21*(j-m).*w+1);
>> Win=1./Wex;
>> R=real(Win);
>> I=imag(Win);
>> Ki=w*(m^2+1).*(I+w*2.04);
>> Kp=m.*I-R+2*m.*w*2.04;
>> plot(Kp,Ki);xlabel('Axis Kp');ylabel('Axis Ki');grid
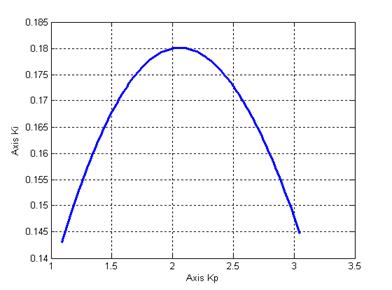
Рисунок 6 – Кривая равной степени затухания
Коэффициенты kp и ki определяем по кривой равной степени затухания (рисунок 6). kp = 2.05 и ki = 0.18. Тогда передаточная функция ПИД-регулятора будет иметь вид
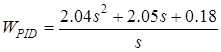 .
.
Построим переходную характеристику САР с ПИД-регулятором.
Script 8:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> Wap3=tf([2.04 2.05 0.18],[1 0]);
>> W3=series(Wap3,Wop)
Transfer function:
1.836 s^4 + 16.13 s^3 + 19 s^2 + 5.77 s + 0.396
-----------------------------------------------
336 s^4 + 146 s^3 + 21 s^2 + s
>> Fi3=feedback(W3,1)
Transfer function:
1.836 s^4 + 16.13 s^3 + 19 s^2 + 5.77 s + 0.396
-----------------------------------------------
337.8 s^4 + 162.1 s^3 + 40 s^2 + 6.77 s + 0.396
>> step(Fi3);grid