Курсовая работа: Исследование линейных и нелинейных систем управления
(336*((j-m).*w).^3+146*((j-m).*w).^2+21*(j-m).*w+1);
>> Win=1./Wex;
>> R=real(Win);
>> I=imag(Win);
>> Ki=w*(m^2+1).*I;
>> Kp=m.*I-R;
>> plot(Kp,Ki);xlabel('Axis Kp');ylabel('Axis Ki');grid
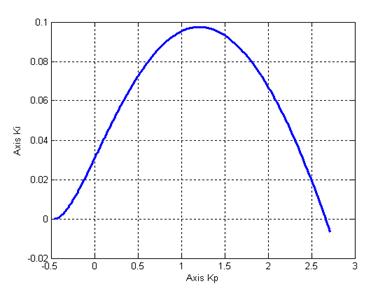
Рисунок 3 – Кривая равной степени затухания
Согласно полученной кривой kp =2.663 при ki =0. Значит коэффициент передачи П-регулятора kP =2.663.
Построим переходную характеристику САР с П-регулятором.
Script 3:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> Wap1=tf(2.663);
>> W1=series(Wap1,Wop)
Transfer function:
2.397 s^2 + 18.64 s + 5.859
----------------------------
336 s^3 + 146 s^2 + 21 s + 1
>> Fi1=feedback(W1,1)
Transfer function:
2.397 s^2 + 18.64 s + 5.859
-------------------------------------
336 s^3 + 148.4 s^2 + 39.64 s + 6.859
>> step(Fi1);grid
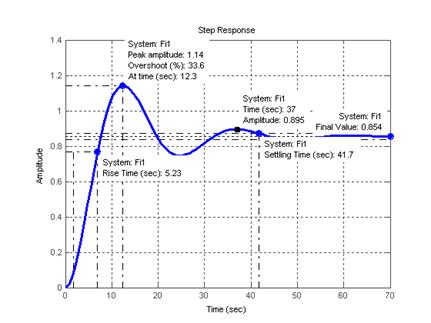
Рисунок 4 – Переходная характеристика САР с П-регулятором
Определяем полученную в результате синтеза степень затухания по формуле
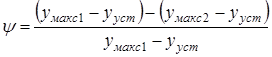 | ( |
Script 4: