Курсовая работа: Кинематическое и кинетостатическое исследование рычажного механизма
Тогда МУР будет равен:
![]()
Реакция R6-1 найдется из векторного уравнения:
2. ![]() , или
, или
 .
.
Примем КР =20 Н/мм и построим векторный многоугольник – план сил группы начального звена (рис. 15 и чертеж курсовой работы).
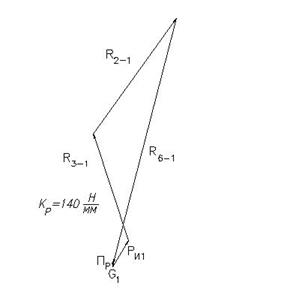
Рис. 15. План сил группы начального звена
Истинное значение реакции R6-1 равно:
![]() .
.
3.7 Определение уравновешивающего момента по методу “жесткого рычага” Жуковского Н.Е.
Схема нагружения "жесткого рычага" – повернутого на 90° плана скоростей механизма показана на рис. 16 и чертеже курсовой работы. При этом моменты разложены на пары сил; составляющие пар сил определяются по выражениям:
![]() ,
,
где МИ и МУР – момент сил инерции и уравновешивающий момент (Нм); l – длина звена (м).
Для данного механизма имеем:
![]() ;
;
![]() .
.
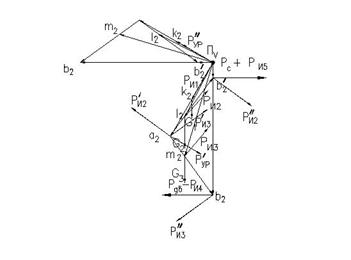
Рис. 16. Схема нагружения "жесткого рычага" Жуковского
Условие равновесия "жесткого рычага" Жуковского:
![]() , или
, или
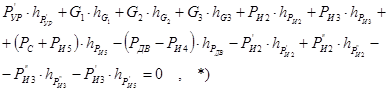
Силы G4 и G5 на рис.16 не показаны (приложены в (·) b2 и b'2 , направлены вертикально вниз).
Тогда
Плечи сил, снятые с чертежа:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Такая точность измерения плечей возможна при выполнении чертежа в какой-либо автоматизированной системе, например, в системе AutoCAD (см. чертеж курсовой работы).