Курсовая работа: Кинематическое и кинетостатическое исследование рычажного механизма
![]() .
.
2.2.4 Для определения скорости точки В составим векторное уравнение
![]() .
.
- Н ВН - Н
В этом уравнении два неизвестных, следовательно, оно решается графически.
Из плана скоростей находим графические значения скорости точки В и относительной скорости вращения точки В относительно точки А: ![]() . Истинные значения этих скоростей равны:
. Истинные значения этих скоростей равны:
![]() ;
;![]() .
.
Для положения № 2: ![]() ;
; ![]() . Для остальных положений механизма значения скоростей VB и VBA приведены в табл. 1.
. Для остальных положений механизма значения скоростей VB и VBA приведены в табл. 1.
2.2.5 Скорость точки В' определяется аналогично из векторного уравнения
![]() ,
,
- Н ВН - Н
в котором также два неизвестных, следовательно, оно решается графически.
Из плана скоростей находим графические значения скорости точки В' и относительной скорости вращения точки В' относительно точки А: ![]() . Истинные значения этих скоростей равны:
. Истинные значения этих скоростей равны:
![]() .
.
Для положения № 2: ![]() ;
; ![]() . Для остальных положений механизма значения скоростей VB ' и VB ' A приведены в табл. 1.
. Для остальных положений механизма значения скоростей VB ' и VB ' A приведены в табл. 1.
2.2.6 Определение скоростей центров тяжести звеньев:
![]() – для всех положений;
– для всех положений;
![]() ;
;![]() .
.
Для положения № 2: ![]() ;
; ![]() . Для остальных положений механизма значения скоростей VM и VL приведены в табл. 1.
. Для остальных положений механизма значения скоростей VM и VL приведены в табл. 1.
2.2.7 Определение скоростей точек В, В', М и L в особых ("мертвых") положениях механизма № 1 и № 4.
В этих положениях абсолютные скорости точек В и В' равны нулю
![]() ;
;![]() ,
,
поэтому относительные скорости VBA и VB ' A численно равны скорости точки А, но имеют противоположное направление ![]() ;
; ![]() .
.
Скорости точек М и L в положениях механизма № 1 и № 4 будут равны
VM = VL = 2/3·VA = 2/3·5,125 = 3,42 м/с.
План скоростей для положения № 2 показан на рис. 7, а план скоростей для 6-ти положений механизма приведен на чертеже курсовой работы.
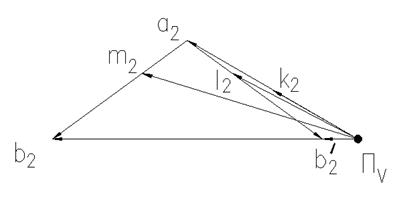
Рис. 7. План скоростей механизма для положения № 2
2.2.8 Определение угловых скоростей звеньев. Угловые скорости звеньев (1/c) определяются по уравнению