Курсовая работа: Механизм привода поворотной части робота
7 ПРОВЕРКА ПРОЧНОСТИ ШПОНОЧНОГО СОЕДИНЕНИЯ
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
ВВЕДЕНИЕ
Технический уровень всех отраслей народного хозяйства в значительной мере определятся уровнем развития машиностроения. На основе развития машиностроения осуществляется комплексная механизация и автоматизация производственных процессов в промышленности, строительстве, сельском хозяйстве, на транспорте.
В данном проекте разрабатывается привод поворотной части робота, состоящий из поворотной колонны и редуктора.
Редуктором называют механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного агрегата и служащий для передачи мощности от двигателя к рабочей машине. Назначение редуктора – понижение угловой скорости и повышение вращающего момента ведомого вала по сравнению с валом ведущим.
1 ИСХОДНЫЕ ДАННЫЕ
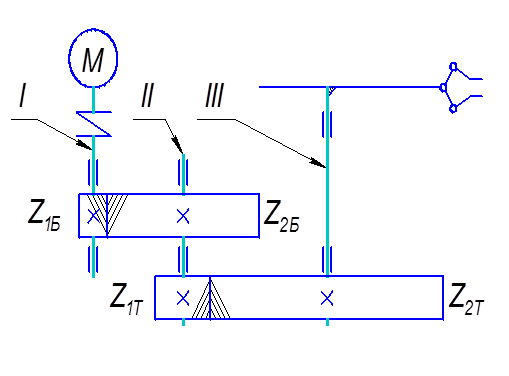
Рис. 1. Кинематическая схема привода
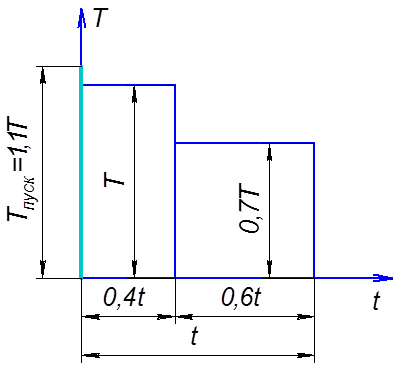
Рис. 2. График загрузки
2 КИНЕМАТИЧЕСКИЕ РАСЧЕТЫ
2.1 Выбор электродвигателя
Потребную мощность электродвигателя определим по формуле:
где ![]()
Здесь ![]() – КПД цилиндрической передачи;
– КПД цилиндрической передачи;
![]() – КПД пары подшипников качения;
– КПД пары подшипников качения;
![]() – КПД соединительной муфты.
– КПД соединительной муфты.
Вычисляем общий КПД привода:
![]()
Потребная мощность электродвигателя:
![]() .
.
Определим частоту вращения вала электродвигателя по формуле
![]() ,
,
где ![]() ,
, ![]() – передаточные числа тихоходной и быстроходной ступеней, соответственно.
– передаточные числа тихоходной и быстроходной ступеней, соответственно.
Рекомендуемые значения передаточных чисел ![]() принимаем по таблице 1.2 [1], получаем:
принимаем по таблице 1.2 [1], получаем:
![]()
![]()
Вычисляем частоту вращения электродвигателя:
![]()
По справочнику [2] подбираем электродвигатель 4А112МА8 со следующими характеристиками:
![]()