Курсовая работа: Проектирование и расчёт следящей системы автоматического управления
100
Максимальная угловая скорость
![]()
1
Максимальное угловое ускорение ОУ
![]()
0.04
Таблица 1.2 – Требования, предъявляемые к качеству процесса управления
|
Максимальное перерегулирование |
|
30 |
|
Время регулирования |
|
1.5 |
|
Максимальная кинетическая ошибка |
|
0.02 |
1.2 Разработка функциональной схемы
В системе слежения, которое проектируется как исполнительное устройство, используется двигатель постоянного тока (Д) серии МИ, как усилитель мощности электромашинный усилитель с поперечным полем (ЭМУ). Для измерительного устройства (ИУ) рекомендуется использовать сельсинную пару: сельсинно-первичный измерительный преобразователь и сельсин-трансформатор (приемник). Поскольку измерительное устройство работает на переменном токе, то после измерительного устройства должен использоваться фазовый детектор (ФД). Кроме указанных элементов в функциональную схему входят управляющее устройство, усилитель напряжения (У), редуктор (Р), при помощи которого исполнительный соединяется с объектом управления и ротором сельсина-трансформатора, и объект управления (ОУ).
Функциональная схема системы слежения представлена на рисунке 1.1.
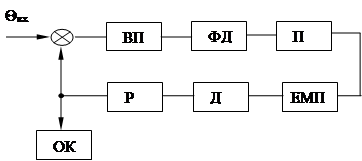
Рисунок 1.1–Функциональная схема системы слежения (![]() -входной сигнал).
-входной сигнал).
1.3 Выбор исполнительного двигателя
Выбор двигателя начинаем с расчёта необходимой мощности, которая должна быть достаточной для обеспечения заданных скоростей и ускорений объекта управления при заданной нагрузке.
Необходимая мощность ![]() , Вт(1.1):
, Вт(1.1):
|
|
(1.1) |