Курсовая работа: Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
![]()

![]()
![]() .
.
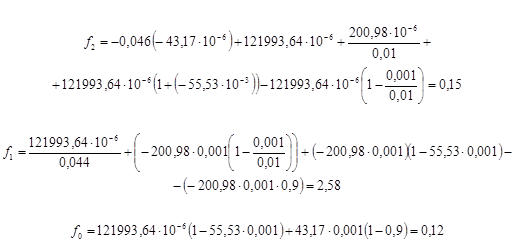
Подставив полученные значения в выражения 5.1 можно определить значения коэффициентов ![]() :
:


7. ПРОЕКТИРОВАНИЕ ПРИНЦИПИАЛЬНОЙ СХЕМЫ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
7.1 Расчет принципиальной схемы управляющего устройства, синтезированного методом последовательной оптимизации:
СУПР – система управления преобразователем;
ПР – силовая схема преобразователя;
Задатчик интенсивности регулирования на операционных усилителях DA1 DA2 и DA3 (релейные элементы и интегратор).
УТ – усилитель тока, выполняет функцию потенциальной развязки выходного сигнала с силовой схемой, так же выполняет функцию усилителя.
Регулятор скорости реализован на усилителе DA2. Регулировка тока реализована на усилителе DA5.
Зададимся
R4 =R3 =8 кОм.
R10 =R11 =33 кОм.
Для получения полного диапазона регулирования, т.е. максимальной скорости, сигнал на выходе DA6 при насыщении DA4 должен быть не менее 10В. Это условие можно записать в статическом режиме:
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Зададимся С2 =0,13 мкФ.
![]() ;
;
![]() ;
;