Курсовая работа: Расчет САУ скоростью электродвигателя постоянного тока независимого возбуждения
1/(4Tot)=2sca^2=1/(32To^2) Þt=8To=8*0.005=0.04 c
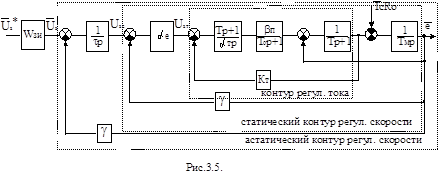
Полная структурная схема системы автоматического регулирования скорости, синтезированной методом последовательной оптимизации контуров, показана на рис. 3.5.
 |
4 СИНТЕЗ САУ МЕТОДОМ МОДАЛЬНОГО УПРАВЛЕНИЯ
Термин «модальное управление» происходит от слова moda – свободное движение.
Метод модального управления, как правило, используется для синтеза астатических САУ. В статических системах существует зависимость между статическими и динамическими свойствами системы, т.е. получив нужные динамические свойства, статические могут оказаться неудовлетворительными. Астатические системы такой проблемы не знают, т.е. получив нужные динамические свойства, статические получаются автоматически.
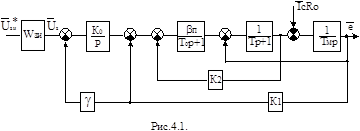
Структурная схема представлена на рис. 4.1. Здесь ![]() - передаточная функция задатчика интенсивности, который преобразует ступенчатый сигнал в линейный и служит для формирования свойств системы по возмущению.
- передаточная функция задатчика интенсивности, который преобразует ступенчатый сигнал в линейный и служит для формирования свойств системы по возмущению.
4.1 СИНТЕЗ САУ БЕЗ УЛУЧШЕННЫХ ДИНАМИЧЕСКИХ ПОКАЗАТЕЛЕЙ
Структурная схема данной САУ показана на рис. 4.2. На основании структурной схемы можно записать следующее:
![]()
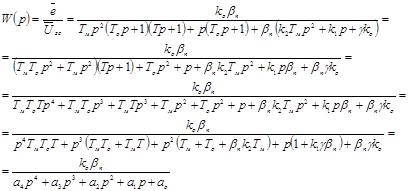
Передаточная функция данной системы будет иметь вид:
 |
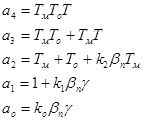
Прировняв коэффициенты при одинаковых степенях p можно записать:
Согласно теореме Виета характеристическое уравнение будет иметь вид:
![]()
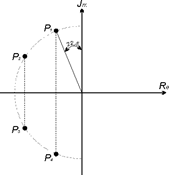
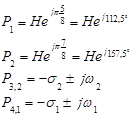
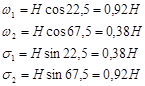
Зададимся распределением характеристических корней по Баттерворду:
![]()
где Н – модуль (чем больше модуль, тем выше быстродействие системы); n – порядок уравнения; i – порядковый номер характеристического уравнения.
Т.о. получим:
Таким образом из вышеуказанного можно записать:

Прировняв коэффициенты при одинаковых степенях p, получим:
![]() (4.1)
(4.1)
![]() (4.2)
(4.2)
![]() (4.3)
(4.3)
![]() (4.4)
(4.4)
Из 4.1 получим: