Курсовая работа: Розрахунок слідкуючої системи
F’2 (р2 )=0,001108(–2,175 – 23,961j)3 + 0,1131 (–2,175 – 23,961j)2 + 0,764 · ·(–2,175 – 23,961j) +21,4 = -40,521+8,348j= 41,372e-11,6° j
F’2 (р3 )=0,001108(–2,175 + 23,961j)3 + 0,1131 (–2,175 + 23,961j)2 + 0,764 · ·(–2,175 + 23,961j) + 21,4 = -40,521-8,348j= 41,372e11,6° j
F’2 (р4 )=0,001108(–1,746)3 +0,1131(–1,746)2 + 0,764 (–1,746) + 21,4=20,405
F1 (0) = 36,4F2 (0) = 36.4
F1 (р1 ) = 36,4·(0,56 (–130) + 1) = -2614
F1 (р2 ) = 36,4·(0,56 (–2,175 – 23,961j) + 1) = -7,935-488,421j= 488,485·e89° j
F1 (р3 ) = 36,4·(0,56(–2,175 + 23,961j) + 1) = -7,935+488,421j= 488,485·e-89° j
F1 (р4 ) = 36,4·(0,56 (-1,746) + 1) = 0,81
Знайдемо вираз для оригіналу f(t):
h(t)=1–0,0335е -130 t +0,49(е -2,175 t +(0,272-23,961 t ) j + е -2,175 t -(0,272-23,961 t ) j )-0,0227e-1,746 t
h ( t )=1–0,0 335 е - 130t –0, 0227 е - 1,746t +0, 245e - 2,175t × cos(-23,961t + 0,272 )
По одержаному аналітичному виразу будуємо графік.
Перехідна характеристика замкненої корегованої системи:
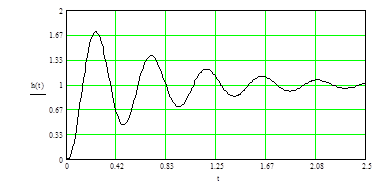
Рис. 9. Перехідна функція замкненої корегованої системи
Якість перехідного процесу характеризується величинами, які визначаємо з графіку:
- Час регулювання Трг = 1,4 с.
- Перерегулювання ![]() = 20,52
= 20,52
- Логарифмічний декремент затухання d=ln(h2 /h1 )=ln(0,18/0,52)=–1,061
- Запас за фазою – Dy(w) = ½-180° - j(wс )½ = ½-180° – (-162°)½= 18°
- Запас за амплітудою – DL(w)=½L(w-180 )½=12 ДБ ; (j(w-180 ) = -180°)
Список літератури
1. Васильєв Д.В. “Системи автоматического управления”, Москва, “Высшая школа”, 1983 г
2. Попович М.Г “Теорія автоматичного керування ” 1994р.
3. Галай М. В., Бреус М.І “Методичні вказівки по курсовому проектуванню з ТАК” Полтава, ПолТУ.