Курсовая работа: Розрахунок слідкуючої системи
j3 = -arctg(0,008×w)
![]()
Тоді маємо j(w)=![]() – 90°– arctg(0,4×w) – arctg(0,01×w);
– 90°– arctg(0,4×w) – arctg(0,01×w);
По одержаним залежностям будуємо графік.
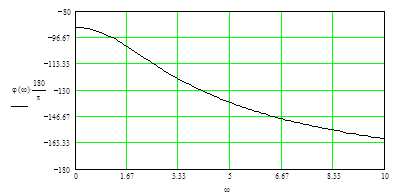
Рис. 8. ЛФЧХ розімкненої корегованої системи.
12.2 Перехідна функція замкненої корегованої системи
Передавальна функція замкненої корегованої системи має вигляд:
![]()
де G0 = T2 /T1 = 0,283/0,65 = 0,435
Маємо a = 1/р тоді
![]()
Підставивши числові значення одержимо
![]()
Запишемо характеристичне рівняння системи:
0 ,00 1132 р4 + 0, 12 р3 + 0, 693 р2 + 2 2 , 22 р + 3 2 , 62 = 0
За допомогою ЕОМ знаходимо корені рівняння (19):
р1 = –101,9;
р2 = –2,175 – 23,961j= 24,06·e85° j ;
р3 = –2,175 + 23,961j= 24,06·e-85° j ;
р4 = –1,746.
Далі для знаходження оригіналу h(t) скористаємося другою теоремою Хевісайда , суть якої в наступному : якщо зображення F(p)функції f(t)має вигляд
![]() ;
;
то її оригінал дорівнює![]()
де pk – корені характеристичного рівняння.
В нашому випадку F1 (p) = 32,6·(0,65р + 1);
F2 (p) = 0,001132р4 + 0,12р3 + 0,693р2 + 22,22р + 32,62;
F’2 (р) = 0,00453р3 + 0,36р2 + 1,386р + 22,22.
Знайдемо значення F’2 (рк ) , де pk – корені характеристичного рівняння.