Шпаргалка: Методы кинематического исследования механизмов
Под степенью подвижности кинематической цепи понимается ее наибольшее число степеней свободы относительно условно неподвижной стойки.
Для плоских механизмов, звенья которых движутся в плоскостях, параллельных между собой, число степеней свободы определяется по формуле Чебышева: W = 3n – 2p1 – p2 . Данная формула является структурной формулой плоских механизмов.
Пассивные связи и избыточные подвижности
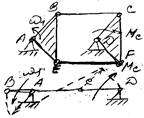
MC –момент сопротивления движению. Переход механизма из одной сборки в другую (механизм неправильно спроектирован). Усовершенствованный механизм с дополнительными звеньями не меняет сборки при работе.
W = 3n–2p1 =3×4–2×6 = 0. Это говорит о том, что механизм не вращается. Но на самом деле он вращается, но есть пассивная связь EF, не добавляющая степеней свободы механизму.
Аналитический метод кинематического исследования механизмов. Аналоги скоростей и ускорений
Кинематическое исследование механизма, т.е. изучение движения звеньев механизма без учета сил, обусловливающих это движение, состоит в основном в решении трех следующих задач:
1) определение перемещений звеньев и траекторий, описываемых точками звеньев; 2) определение скоростей отдельных точек звеньев и угловых скоростей звеньев; 3) определение ускорений отдельных точек звеньев и угловых ускорений звеньев. В аналитической форме функция перемещений, скоростей или ускорений задаются в виде функции, связывающей перемещение или угол поворота ведущего звена со временем, в зависимости от того, какую пару образует ведущее звено. Рассмотрим Группу Ассура 3-го вида:
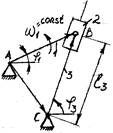
Используется метод замкнутых векторных контуров.
1)`A`B =`A`C + `C`B,
óСх +ℓ3 cosj3 = Bx
ôCy +ℓ3 sinj3 = By
ℓ3 =Ö[(Bx –Cx )2 +(By –Cy )2 ], j3 = arctg[By –Cy )/(Bx –Cx )],
откуда Bx =ℓAB cosj1 ,
By = ℓAB sinj1 .
2)Угловая скорость wk этого звена может быть представлена так: w3 = dj3 /dt – угловая скорость, j¢3 = dj3 /dj – безразмерная угловая скорость звена 3, называемая аналогом угловой скорости.
3)Угловое ускорение определяется формулой ek = dwk /dt, тогда d2 j3 /dj1 2 = j3 ¢¢ называется аналогом углового ускорения. Скорость поступательного движения какого-либо звена равна V = dS/dt , величина
dS/dt=dS/dj×dj/dt,
где dS/dt – аналог скорости, имеющий размерность длины. Т.е V = S¢×w (уравнение связи), где S¢–аналог скорости звена. Продифференцировав это выражение по времени, получаем
am = dV/dt = d(S¢w)/dt = w×dS¢/dt + S¢dw/dt = w2 S¢¢ + eS¢.
Величина a = S¢¢=d2 S/dj2 есть аналог ускорения, имеющий также размерность длины.
Графический метод кинематического анализа плоских рычажных механизмов. Два метода разложения движения. Построение планов скоростей и ускорений. Теорема о подобии

1-й способ разложения движения (применяется когда известно движение одной точки звена и требуется определить движение другой точки того же звена):
VB = VA +VBA ,
где VA –переносная скорость, VBA – относительная скорость (скорость точки В по отношению к точке А),