Шпаргалка: Методы кинематического исследования механизмов
Основная задача: w1 =w1 (j), вспомогательная задача:
d=(wmax –wmin )/wср > [d]
m×x=Fx , m×y=Fy , J×j=M

Jпр ×wср 2 /2=TS =S(mi ×VSi 2 /2+JSi wi 2 /2),
Mпр – приведенный момент, Jпр – приведенный момент инерции, Т – кинетическая энергия.
Jпр = 2/wср 2 × S(mi ×VSi 2 /2 + JSi ×wi 2 /2), Jпр =S(mi (VSi /wср )2 +JSi (wi /w)2 ), V=S¢w – скорость с аналогом скорости,
A=S¢¢w2 – ускорение с аналогом ускорения. Определим момент сил, действующих на звено приведения:
Mпр ×wср =S(Fi ×VSi (cosa)+Mi wi ), Мпр =1/wср S(Fi ×VSi (cosa)+Mi wi )= S(Fi ×VSi ×cosa /wср +Mi (wi /wср ).
Определение момента инерции маховика методом профессора Мерцалова
TMM +TS –T0 =SA,
где TMM – кинетическая энергия массовых масс, равная
TMM =Tmax –TЗВ const ,
где Tmax – кинетическая энергия маховика, TЗВ const – кинетическая энергия звеньевых констант.
DTMM =(SA +T0 –TS )max (при wmax )–(SA+T0 –TS )min (при wmin ). Т.к. Т0 =const, то: JMM /2(w2 max –w2 min )=(SA–TS )max –(SA–TS )min , JMM /2(wmax +wmin )(wmax –wmin )= (SA–TS )max –(SA–TS )min , JMM w2 ср [d] =(SA–TS )max –(SA–TS )min , JMM = [(SA–TS )max –(SA–TS )min ] / [d]wср 2 , Jmax = JMM –JЗВ const .
Этот момент считается приблизительно, т.к. мы среднее значение определяем грубо (не точно) – по графику.
Определение момента инерции маховика методом Виттенбауэра (метод энергомасс)
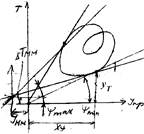
Tg ymin =yT /xy , т.к. T=yT ×mT , а Jпр =хy my , то tgymin =(T/mT )/(Jпр /my )=Tmy /(Jпр mТ ).
Перенеся масштабные коэффициенты в левую часть получим:
tgy ×mT /my =T/Jпр = Jпр ×(w2 min /2)/Jпр = wmin 2 /2, т.е. w2 min =2mT /my tgymin (1).
По этому графику можно определять момент инерции маховика:
wср =(wmax +wmin )/2 (2), d=(wmax –wmin )/wср (3).
Из формулы (3) получаем wmax =d×wср +wmin . Из формулы (2) получаем: wmin =2wср –wmax . Подставив wmax в это выражение получаем:
wmax = dwср +2wср +wmax , = wср (1+d/2)
wmin = wср (1–d/2).
Подставив полученное в выражение (1), получим:
wmax 2 =wср 2 (1+d+d2 /4) » wср(1+d), w2 min = wср 2 (1–d+d2 /4)»w2 ср (1–d), т.к. d –
малая величина, то d2 /4 будет еще меньше, следовательно, ей можно пренебречь, тогда: