Шпаргалка: Методы кинематического исследования механизмов

3)hx 1 , SMB =0 (равновесие звена 2):
F23 hx 1 –G2 h1 +FИ2 h2 =0, hx 1 =G2 h1 +FИ2 h2 =0
4)hX 2 , SMB =0 (равновесие 2 и 3):
F34 hX2 –G3 h3 –FИ3 h4 –G2 h1 +FИ2 h2 =0
hX2 =(G3 h3 +FИ3 h4 +G2 h1 –FИ2 h2 )/F34 .
Силовой расчет с учетом сил трения
Если учитывают силы трения, то сначала расчет производится без учета трения, а во втором расчете рассчитывают эти силы трения.
Fтр =F34 ×f,
где f – коэффициент трения
Определение уравновешивающей силы
Уравновешивающая сила определяется по рычагу Жуковского. Рычагом Жуковского называется повернутый на 90° план скоростей (желательно против направления вращения начального звена), к которому прикладывают все силы, действующие на механизм без изменения их направления и ищется равновесие этого рычага по принципу Лагранжа (для равновесия твердого тела необходимо, чтобы сумма работ равнялась нулю), т.е.
SFi ×dSDi cos(Fi , dSDi ) = 0, SFi dSDi cos(Fi ,dSDi )=0, точка D – точка, лежащая на звене к которой приложена сила F. Разделим все на dt:
SFi ×VDi cos(Fi , VDi ) = 0
Для равновесия твердых тел необходимо и достаточно, чтобы мощность всех действующих на систему сил равнялась нулю. P = F2 VS2 cos a= F2 (PV S2 )mV cos a.

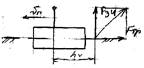
План ускорений
![]()
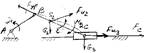
План скоростей
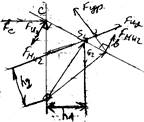
Рычаг Жуковского
MИ2 = FМИ2 ×ℓBC , FM И 2 = MИ2 /ℓBC ,
Момент на рычаге Жуковского:
mV (Fур (ab) +FM И 2 (bc)–G2 h1 –FИ2 h2 –(FC +FИ3 )pV c)=0,
Fур = (–FМИ2 ×bc+G2 h1 +FИ 2 h2 +(FC +FИ3 )pV c)/ab
Уравновешивание рычажных механизмов
Метод замещающих масс: