Курсовая работа: Динамический синтез систем автоматического управления
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Тема: "Динамический синтез систем автоматического управления"
Введение
Существует чрезвычайно большое разнообразие автоматических систем, выполняющих те или иные функции по управлению самыми различными физическими процессами во всех областях техники.
В данной курсовой работе производится динамический синтез следящей системы автоматического управления.
В следящей системе выходная величина воспроизводит изменение входной величины, причем автоматическое устройство реагирует на рассогласование между выходной и входной величинами. Следящая система имеет обратную связь выхода со входом, которая по сути дела, служит для измерения результата действия системы. На входе системы производится вычитание входного сигнала и сигнала с датчика обратной связи. Величина рассогласования воздействует на промежуточные устройства, а через нее на управляемый объект. Система работает так, чтобы все время сводить к нулю рассогласование.
В состав системы входят нелинейности, именно поэтому по характеру внутренних динамических процессов ее относят к нелинейным системам. По протеканию процессов в системе ее относят к непрерывным, т. к. в каждом из звеньев непрерывному изменению входной величины во времени соответствует непрерывное изменение выходной величины.
Для того чтобы линеаризованная система отвечала требуемым показателям качества в установившемся режиме и переходном процессе, она подвергается синтезу, а именно, в нее включается регулятор, который реализует выбранный закон управления. В интересах простоты расчета сводим задачу к такой форме, чтобы максимально использовать методы исследования обыкновенных линейных систем, т. к. теория и различные прикладные методы для них наиболее полно разработаны.
1. Синтез линейной системы
1.1 Анализ исходной системы
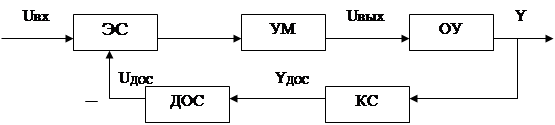 |
Рисунок 1.1 Функциональная схема замкнутой системы,
где
ЭС - элемент сравнения;
УМ – усилитель мощности;
ОУ – объект управления;
КС – кинематическая связь;
ДОС – датчик обратной связи;
Усилитель мощности предполагается безынерционным, но с ограниченной зоной линейности ±UВХ max . В кинематической связи между ОУ и ДОС присутствует люфт (зазор) величиной 2D (рис. 1.2.).
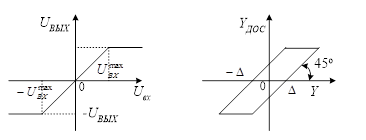
Рисунок 1.2. – Нелинейные характеристики элементов
Передаточные функции ОУ и ДОС известны:
![]() ,
,
где ![]()
![]() ,
,
где ![]()
Составим структурную схему исходной системы:

Рисунок 1.3 Структурная схема исходной системы
Для линеаризации системы пренебрегаем наличием нелинейных эффектов, то есть, считаем, что:
- усилитель мощности имеет неограниченную зону линейности
- зазор (люфт) в кинематической связи "выход системы – датчик обратной связи" отсутствует и коэффициент передачи равен единице
Усилитель мощности, имея неограниченную зону линейности, будет иметь передаточную функцию вида:
--> ЧИТАТЬ ПОЛНОСТЬЮ <--