Курсовая работа: Динамический синтез систем автоматического управления
Для того, чтобы входное воздействие воспроизводилось с ошибкой, не превышающей em , ЛАХ системы должна проходить не ниже контрольной точки Ak c координатами:
(1.3)
Построим запретную область (ЗО)
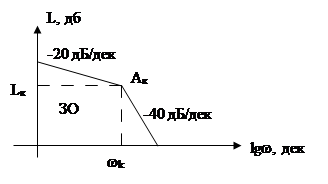
Рисунок 1.7 Запретная область
Определим минимальный коэффициент усиления разомкнутой системы [1, § 12.6]с пропорциональным регулятором, учитывая
![]() , где ε m – относительная ошибка системы
, где ε m – относительная ошибка системы
![]() с-1
с-1
Отсюда, коэффициент усиления пропорционального регулятора:
![]()
1.2.2 Проверка устойчивости замкнутой системы
Для проверки устойчивости замкнутой системы воспользуемся алгебраическим критерием Гурвица. [1, § 6.2]
Запишем характеристическое уравнение системы:
![]()
Т.к. система 4 порядка, то достаточно определить D3
![]()
![]()
Т.к. определитель больше нуля и все коэффициенты положительны, то замкнутая система с пропорциональным регулятором устойчива.
Теперь проверим систему по критерию Найквиста: [1, § 6.5] анализируем разомкнутую систему, а вывод делаем об устойчивости замкнутой системы.
Передаточная функция разомкнутой системы имеет вид:

Запишем характеристическое уравнение разомкнутой системы:
![]()
Все корни характеристического уравнения левые, кроме одного нулевого. Если разомкнутая система на границе устойчивости, то для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал особую точку с координатами (-1;j0).
![]()
Выделим действительную и мнимую часть:
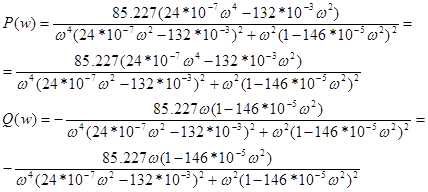
(1.5)